GRiD Compass
Previous messages
формат примерно такой
первый аргумент - .CSV
второй (опционально) - с какой секунды искать помехи



_thumb.webp)



_thumb.webp)








 🔥
🔥


 😁
😁


 Next messages
Next messages
6 June 2023
Y
10:09
YL3AKC
Пидётся сильно рыть в коде.
10:10
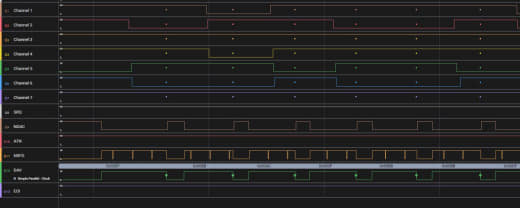
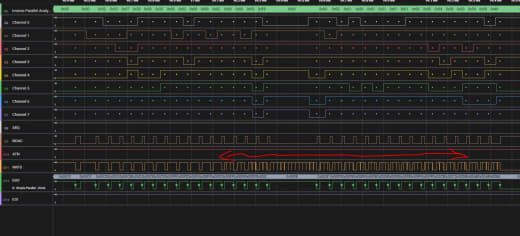
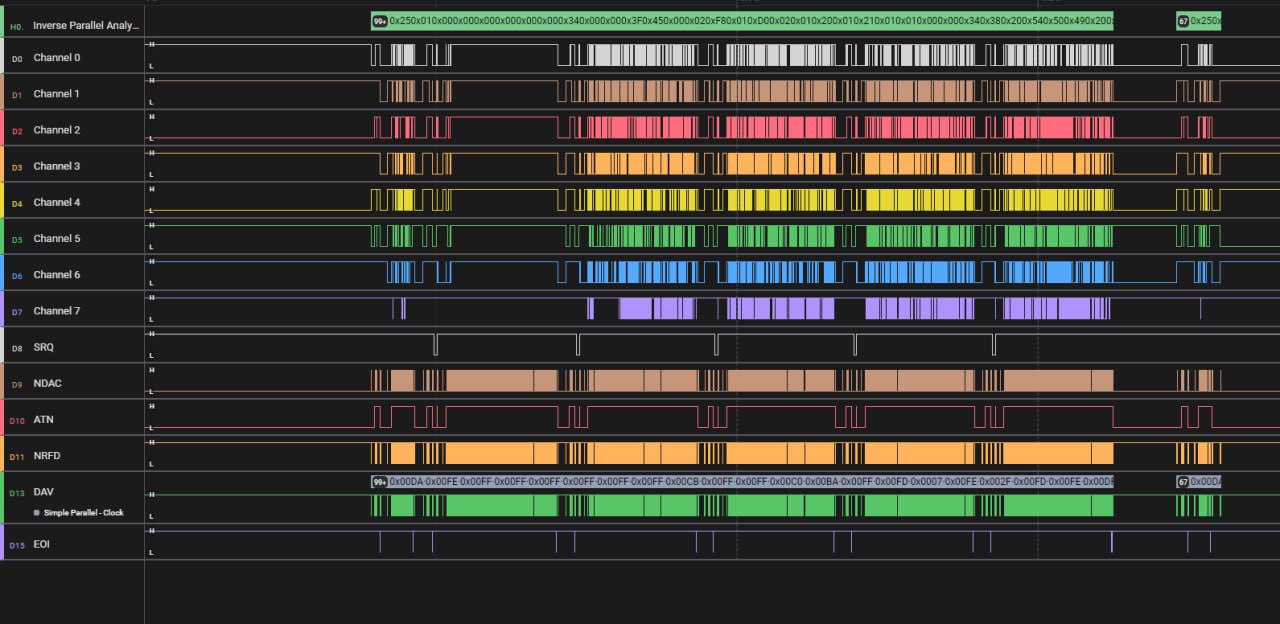
К стати эта диаграмма отрендерена чтоб показывало с маштабированием в реальном времени.
u
10:10
usernameak
это грид ее опускает скорее всего
Y
10:10
YL3AKC
Нет!
10:12
В место input pullup по ошибке может саплить output low или output high
u
10:12
usernameak
да и тем более - если грид его пытается опросить, то уже и так всё пропало
Y
10:12
YL3AKC
если в место input будет любой output, то ГРиД не чего не сможет поделать.
10:16
In reply to this message
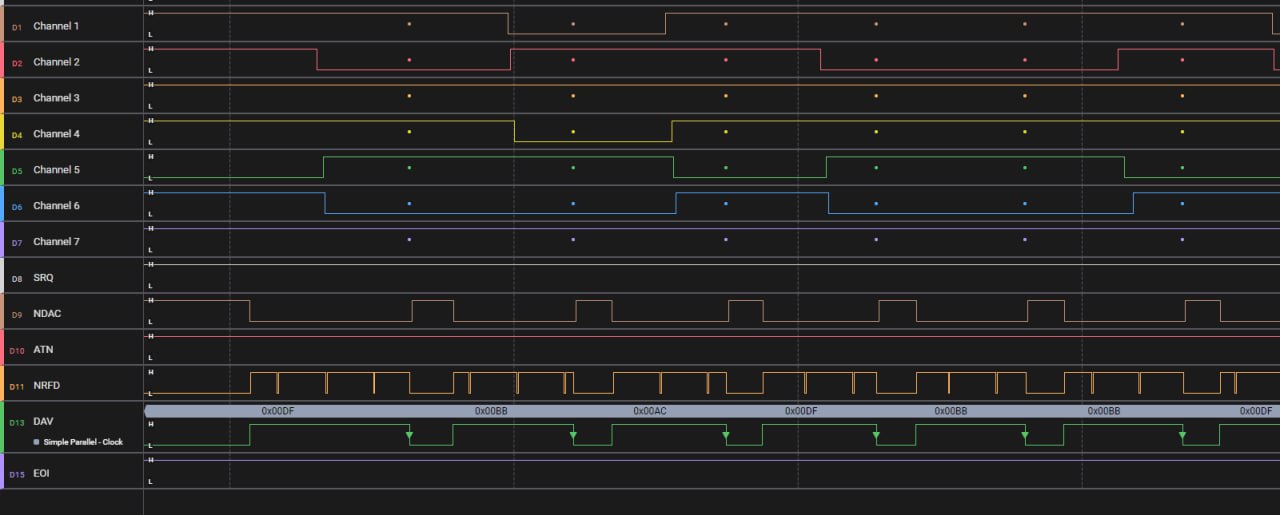
Хотя, я перепутал. Перед меткой А прошла команда Listen 6. Значит ГРиД хочет передать данные, но шина заблокирована. Шина заблокирована примерно на 5 секунд. В CCPROM коде происходит таймаут и цикл загрузки ОСьи повторяется.
u
10:17
и он ждёт данных
Y
10:17
YL3AKC
Тест не, перед а сразу за меткой.
10:17
А перед меткой В пролитает команда Untalk.
u
10:18
usernameak
In reply to this message
про этот момент: грид работает не по спецификации в этом моменте, и эта команда значит что говорить будет грид
Y
10:18
YL3AKC
А потом Device Clear
u
Y
10:19
YL3AKC
Тут как раз ГРиД отрабатывает штатно.
u
Y
10:20
YL3AKC
Адрес ГРиДа не при чем. По сути он не нужен в принципе. Ибо на шине мастер только сам ГРиД. По крайней мере во время загрузки.
10:20
Устройства слушает только то что им говорят.
10:20
Типа: 5. говори или 5. слушай.
10:21
Ну а 5. пофиг кто пасылает данные пока 5. слушает.
10:22
Или 5. посилает данные согласно хендшейку, но ему пофиг кто их принимает. Лишь бы линий хендшейка дергалис согласно протоколу.
10:22
Как то так.
u
10:24
usernameak
одно я знаю - что мой код может конфликтовать с другими устройствами на шине
10:24
но там нет других устройств
Y
10:26
YL3AKC
Ну а если Грид сказал: 6. слушай
То 5. должен отпустить линий хендшейка, ибо данные не для него.
А 6. и ГРиД шаманит хендшейком пока не закончат.
После того ГРиД активирует ATN линию, и все должни случат команду от ГРиДа и все (+/-) в месте правильно дергать хендшейк линий.
То 5. должен отпустить линий хендшейка, ибо данные не для него.
А 6. и ГРиД шаманит хендшейком пока не закончат.
После того ГРиД активирует ATN линию, и все должни случат команду от ГРиДа и все (+/-) в месте правильно дергать хендшейк линий.
10:28
In reply to this message
Но... ГРид хочет принять от 6. остройства данные. 6. Устройство будет дергать DAV. А ГРид будет дергать NDAC и NRFC лини, но... 5. устройство их зажала и ГРиД не может дергать.
u
10:29
usernameak
In reply to this message
только вот это не является особой проблемой, потому что он один хрен ничего не получит - никакого устройства нет)
Y
10:32
YL3AKC
ГРиД ждет, но ждет не по причине отсутствие ответа, а по причине некоректного хендшейка на шине.
А это уже совсем другие данные в регистрак контроллера шины, ну и код загрузки на них по другому реагирует.
А это уже совсем другие данные в регистрак контроллера шины, ну и код загрузки на них по другому реагирует.
10:33
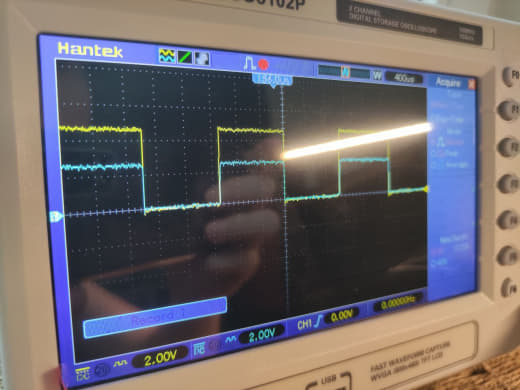
Эелектрическая проблема начнется в тот момент когда эмуль дернит (в мест пулапа) линию на вех, а ГРиД захочет дернуть в низ.
10:41
Сорры, не те фотки. Теперь подправил.
10:45
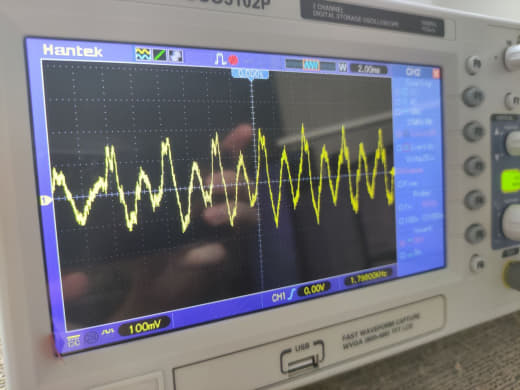
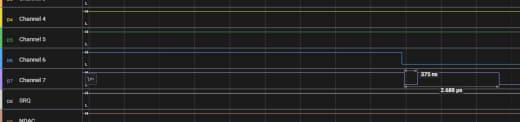
А возле точки В, NRFC вдруг начинает колбасится как бешеный.
После чего ГРиД посылает команду: Untalk.
После чего ГРиД посылает команду: Untalk.
10:47
Период колбасы около 4.6 микросекунд. Частота 200-250 КГц. Возможно малинка шалит.
Y
11:18
YL3AKC
Мммда. На моем ноутбуке не хватает памяти что открыть точную диаграмму с реальным флопиком и детально проанализировать.
Ибо файл вырос в 3 Гектара.
Ибо файл вырос в 3 Гектара.
Y
11:42
YL3AKC
Еще бы на малинке поставить задержи 2-3 микросекунды на линий хендшейка после того как малинка поменяла уровень линий.
u
11:43
он ждёт ответа вообще в любом случае
Y
11:45
YL3AKC
Как именно ждет? Что он чекает в регистрах контроллера ГПиБ ?
u
11:45
usernameak
In reply to this message
это на более высоком уровне, чем регистры контроллера происходит
Y
11:48
YL3AKC
In reply to this message
На таком уровне просто летает пачки данных определенной длинны. Команды для дисковода (1.4.5. итд) и ответы на них.
u
11:48
нет ответа сколько-то секунд? выдать ошибку и попробовать следующий девайс в очереди
Y
11:49
YL3AKC
ГПиБ получается почти прозрачным. Кроме некого общего статуса состояния контроллера.
u
11:49
usernameak
In reply to this message
из ОС контроллер гпиб вообще доступен как файл с ворохом иоктлов, да
Y
11:52
YL3AKC
А эмулировать надо и железо GPiB... {/:}
u
11:53
usernameak
In reply to this message
единственный случай когда оно может выдать ошибку не по таймауту - это если привод сам ее отправил)
Y
u
Y
12:00
YL3AKC
Еще кажется, но это не точно, - малинка иногда слишком быстро отвечает. При этом контроллер ГПиБ не успевает понять изменение.
u
12:01
usernameak
In reply to this message
меня больше напрягает то, как процессор читает с интерфейса
12:01
ему вообще глубоко насрать на все эти линии сигнализации
Y
12:03
YL3AKC
In reply to this message
Этим занимается контроллер шины. Он процессору сигналирует прерыванием, участвует в обмене с помочю ДМА. И принимает команду EOI. На уровне драйвера ГПиБ.
u
12:04
куда оно дма-то делает
12:04
оно читает из 0xE0000, что далеко за пределами оперативки
Y
12:05
YL3AKC
Помнишь что в патенте было написано про псевдоДМА?
u
12:05
usernameak
в каком?
Y
12:05
YL3AKC
ПсевдоДМА реализуется командами REP MOVSB
u
12:05
только это получается что оно дико зависит от таймингов
Y
12:07
In reply to this message
Да, томожение процессора, но частоты подобраны таким образом что мало теряется. Проц на 5 МГц плюс количесто тактов на команду, а ГПиБ на 4 МГц.
u
Y
12:08
YL3AKC
Драйер настраивает адрес буфера в ОЗУ и длину буфера. А потом это отрабатувает проц. Пишет/читает ОЗУ и читает/пишет в "ДМА адрес".
12:09
"ДМА адрес" перехватывается ПЛИСинами и как то раманится.
u
Y
12:10
YL3AKC
За одно, не надо забывать что там участвует контроллер клавиатуры.
Ибо в нем есть железная сторожевая собака, которая при таймауте останавливает ету всю херня с псевдоДМА, если слишком долго не чего толкового не происходит.
Ибо в нем есть железная сторожевая собака, которая при таймауте останавливает ету всю херня с псевдоДМА, если слишком долго не чего толкового не происходит.
12:12
In reply to this message
По сути всё рoвно куда именно писать/читать в ДМА, лишь бы попало в пространство E000:0000-E000:FFFF
u
12:12
usernameak
In reply to this message
если они не подвели туда линию HALT, это становится очень чувствительно к таймингам
Y
12:14
YL3AKC
In reply to this message
Да хер его знает что и куда они там подвели. Скорее всего что не подвели ради ДМА. Просто ПЛИСины эмулирует целый кусок ДМА памяти в соответстующик адресах.
12:15
Это напоминает частичную декодировку ОЗУ адреса в Денди (NES) приставке, где одни и те-же 2 КБайт памяти повторяется 4 раза.
Суть понял?
Суть понял?
u
12:16
usernameak
In reply to this message
в PS1 ещё такой прикол был где вся память повторялась несколько раз, но там это был криво настроенный контроллер памяти)
Y
12:19
YL3AKC
In reply to this message
Ну да, в денти то же самое, только из за экономи в железе.
Ну и в ГРиДе подобно. Один и тот же ДМА байт повторается 65536 раз.
Ну и в ГРиДе подобно. Один и тот же ДМА байт повторается 65536 раз.
u
12:20
usernameak
In reply to this message
в пс1 контроллер просто был настроен на 8 метров вместо реально имеющихся двух (забыли поменять настройку с девкитов (в которых было 8 метров!), а потом не могли поменять потому что чей-то код уже от этого зависел)
причём что смешно, из-за этого если оперативка кончалась, у тебя корраптлиась вся память
причём что смешно, из-за этого если оперативка кончалась, у тебя корраптлиась вся память
Y
12:22
YL3AKC
Что сказать? Мир не идеален!
Сферический конь в вакууме - такое себе...
Сферический конь в вакууме - такое себе...
12:23
То есть, все допускает ошибки. Ну или экономят на чем-то.
12:23
Но...
ГРиД!
ГРиД!
12:23
Толком не понятно что именно ломается.
12:24
Есть только боле или менее вероятны догадки.
u
12:24
usernameak
In reply to this message
мне кажется проблема как раз в том, что на DMA сыпятся тайминги
12:24
важно: ATN команды идут не через дма
Y
u
Y
12:27
YL3AKC
In reply to this message
Возможно ATN генерируется контроллером автоматом после того как CCPROM дает команду придача устройству или прием с устройства.
u
12:28
контроллер более тупой чем ты думаешь
12:29
оно ручками их засылает
Y
12:29
YL3AKC
Возможно.
12:32
Помню в дизасме CCPROM видел и REP MOVSB и дела связанные с таймаутом на контроллере клавиатуры.
12:38
Ха! А если проблема с прерыванием SRQ?
То есть малина слишком быстро приготавливает данные о секторе и запрашивает внимание?
То есть малина слишком быстро приготавливает данные о секторе и запрашивает внимание?
12:39
В реале ведь проходит много времени пока сектор считывается с диска....
u
12:39
поток просто блокируется пока оно не придёт и грид занмается другими делами (в случае с бутом - ничегонеделаньем)
12:40
а как видит прерывание, опрашивает кто это сделал и разблокировывает нужный поток
Y
12:40
YL3AKC
Если выдает за пару микросекунд, то CCPROM драйвер даже не готов принять.
u
12:40
семафор инициализируется заранее
Y
12:41
YL3AKC
In reply to this message
В то то и прикол. CCPROM nе успеваeт закончить дела ГПиБ драйвера, как уже приlетает прерывание.
u
Y
12:42
YL3AKC
А если нет?
12:43
Просто надо подождать скажем 1000 микросекунд перед выдачей SRQ.
u
12:44
usernameak
In reply to this message
если что, в гриде есть нормальные примитивы синхронизации потоков
ВЗ
Y
12:47
YL3AKC
А они полностю применяется во время загуски начального бутлоадера в CCPROMе?
u
12:47
хотя и большую часть времени в idle проводит
Y
12:47
YL3AKC
Вроде там деается несколько тасков, но...
u
12:48
usernameak
не, как раз чтение с диска там дико на этом завязано
12:48
т.к. драйвер оттуда и в ОС используется
Y
12:48
YL3AKC
Что случится если прилетит ГПиБ прерывание до того как драйвер ГПиБ закончит некоторые важные дела?
u
12:48
когда тот закончит, всё сделается)
Y
12:49
YL3AKC
Всякое бывает...
u
12:49
usernameak
впрочем, драйвер гпиб это чисто какая-то жесть
12:49
они явно пытались его правдами и неправдами упаковать в 16кб
Y
16:08
YL3AKC
@Megabozyakorovka А где запись стрима с ковырянием по ГРиДу? Как то в bitch только видосы с последнего стрима про камадор...
KL
16:10
Kirill Leyfer
In reply to this message
а, блин, надо на юпуп выложить
постараюсь не забыть и выложить сёдня как домой вернусь
если не отпишусь - пните пожалуйста
постараюсь не забыть и выложить сёдня как домой вернусь
если не отпишусь - пните пожалуйста
Y
16:12
YL3AKC
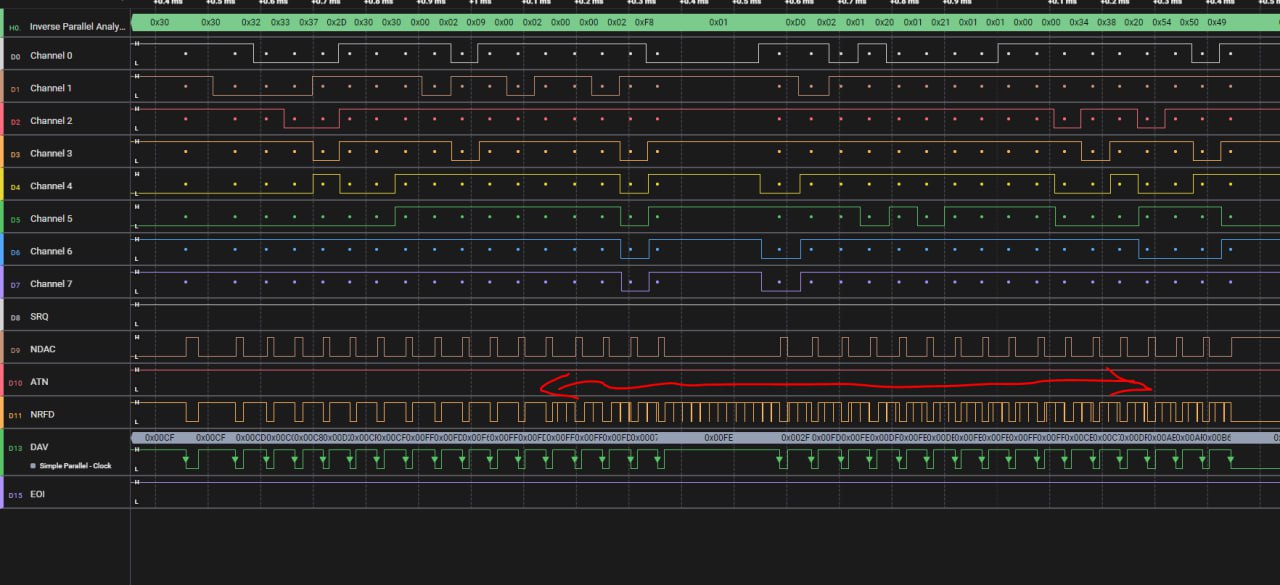
Хорошо, но...
Где там Saleae плагин/анализатор, который ивертирует сигнал?
Где там Saleae плагин/анализатор, который ивертирует сигнал?
KL
16:14
Kirill Leyfer
а, я сам написал его
16:14
буду дома - скину код, если что - там всё оч просто на питоне
KL
Y
22:01
Оказывается могу и 3 гектара посмотреть если браузер закрыть.
22:02
Может дажа получтся портануть анализатор IEEE-488 из pulseview в saleae
22:03
А видос годный по техническим причинам, чтоб понять что и как делал/изменял в коде.
7 June 2023
Y
18:06
YL3AKC
@usernameak @Megabozyakorovka Вопрос:
@usernameak Написал эмуль флопика для MAME GRiD эмуляатора.
@Megabozyakorovka Взял код и прикрутил GPIO для малинки.
@usernameak Написал эмуль флопика для MAME GRiD эмуляатора.
@Megabozyakorovka Взял код и прикрутил GPIO для малинки.
18:07
Теоретически надо просто отладить работу GPIO и всё должно заработать?
18:09
Смотрю про флопик комодора чтоб найти вдохновение для продолжения исследования GPiB логов.
https://www.youtube.com/watch?v=_1jXExwse08
https://www.youtube.com/watch?v=_1jXExwse08
Y
18:59
YL3AKC
Блин! Эта планета такая маленькая...
tschak909 в переписке на форуме VCFed сказал что у него нет время на GRiDcase по тому что он занят проектом Fujinet.
Как то мне только что в ютюбе выскачил один ролик.
Оказывается что автор проекта fujinet это mozzwald.
7 лет назат я с mozzwald тусовали в IRCе в Zipit Z2 проекте.
tschak909 в переписке на форуме VCFed сказал что у него нет время на GRiDcase по тому что он занят проектом Fujinet.
Как то мне только что в ютюбе выскачил один ролик.
Оказывается что автор проекта fujinet это mozzwald.
7 лет назат я с mozzwald тусовали в IRCе в Zipit Z2 проекте.
19:00
19:01
Нннда. Планета Земля маленькая.
И не надо так много смотреть ютюб...
И не надо так много смотреть ютюб...
YL
19:59
Yuri S. Leskovec
Я знаком с Томасом, у него есть мой ноутбук😂
Y
20:01
YL3AKC
In reply to this message
В смысле: есть"? У него на ремонт отдал? Рассказывай подробности! Интересно!
YL
20:06
Yuri S. Leskovec
Мы с ним познакомились в начале 2019. Он занимался эмулятором PLATOterm. Он купил у меня GRiDCase 1537. Целую статью написал про работу на моем ноутбуке, а я Томаса в свою книгу включил
ВЗ
20:07
Владислав Задорожкин
Даа, ретро это тема на самом деле тесная
20:08
Если речь идет о профессионалах, а не о идиотах, только умеющих орать "Ретро" и вертеть в руках 3310
Y
20:08
YL3AKC
In reply to this message
Да... Относительно книги... Хотелось бы...
Попробую договорится с Лёшей Кластером, он в Армений. Может через него смогу купить.
👍
Попробую договорится с Лёшей Кластером, он в Армений. Может через него смогу купить.
YL
Y
9 June 2023
Y
KL
13:45
Могу попробовать грид в том числе
10 June 2023
KL
13:04
Kirill Leyfer
whataboutforests
: подтяжки на линии данных/управления не требуются по спецификации на шину?
: подтяжки на линии данных/управления не требуются по спецификации на шину?
KL
14:03
Kirill Leyfer
ЧУВОКИ
14:03
у меня есть подозрение, что проблема аппаратная
u
KL
14:04
Kirill Leyfer
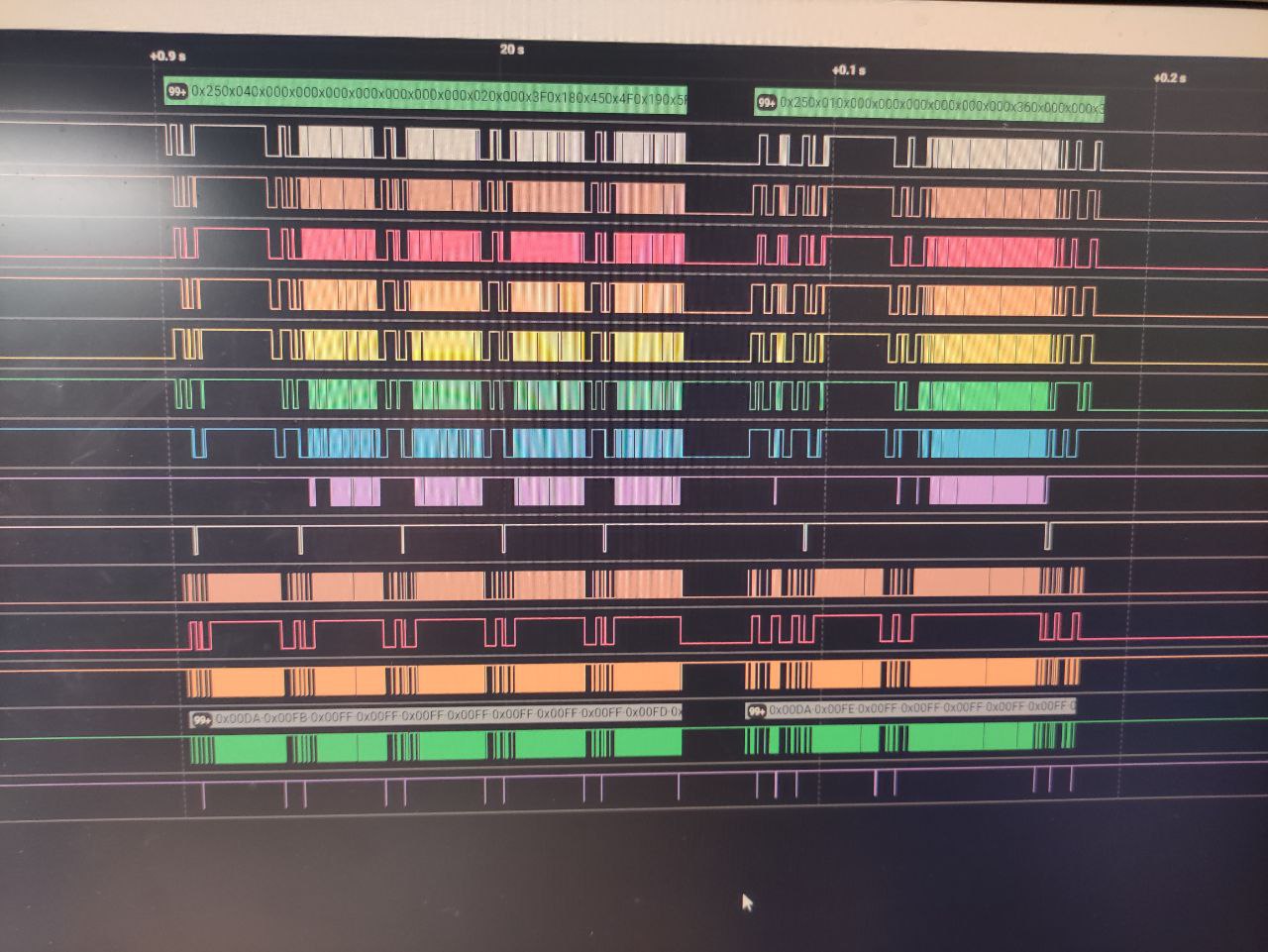
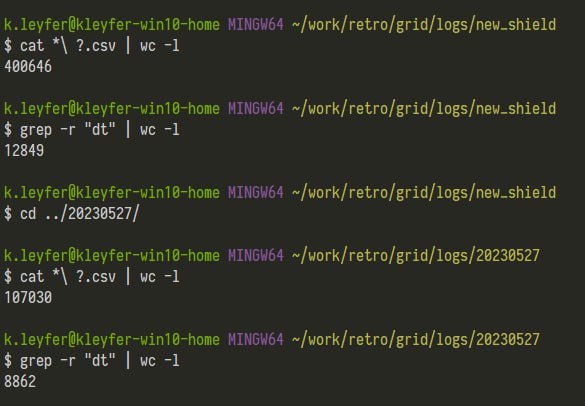
проблема в помехах на линиях
14:04
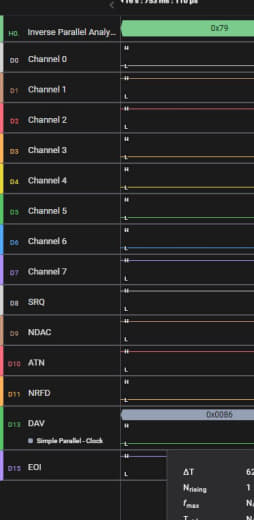
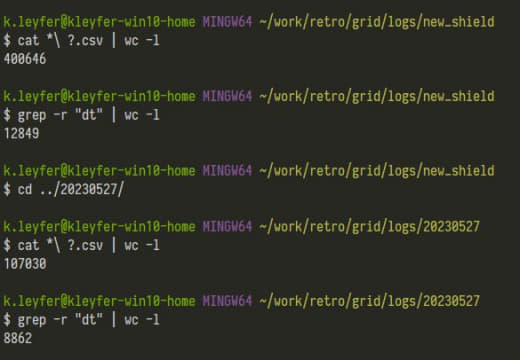
сегодня я напитонил небольшой скриптец, который анализирует CSV-шный выхлоп
14:04
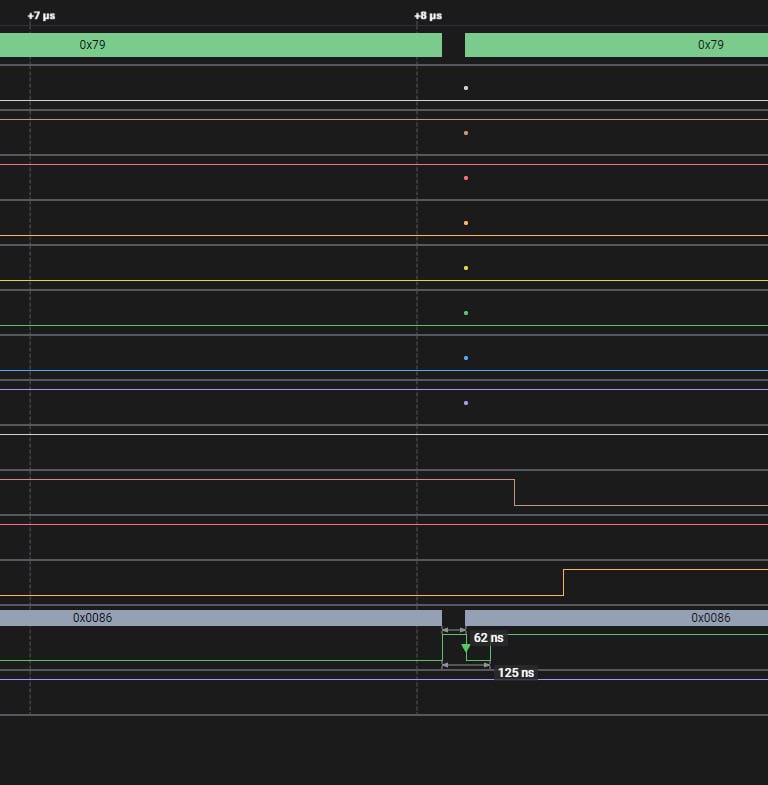
и стал искать места, где значение сигнала меняется в пределах частоты дискретизации лог анализатора
14:04
т.е 62 наносекунды
14:05
и короче говоря, я проанализировал лог, сняты с реального флопика
там на сессию длиной полторы минуты было всего около 240 таких помех - в основном, на линии NRFD
там на сессию длиной полторы минуты было всего около 240 таких помех - в основном, на линии NRFD
14:06
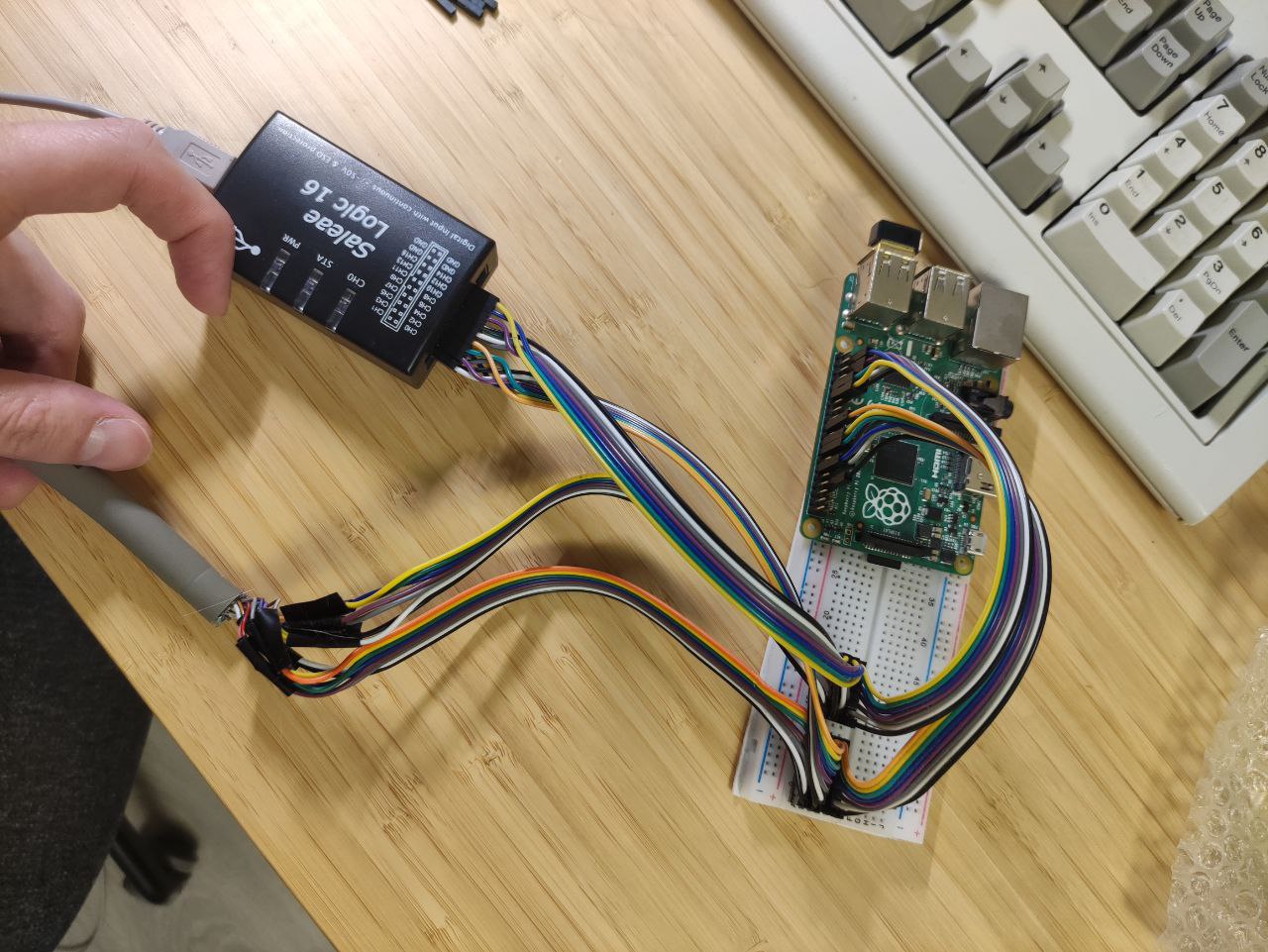
а мой эмулятор, собранный из говна и палок и проводов от макетки, за сессию в 60 раз короче успел насобирать 2300 таких помех
14:06
короче говоря, вот вам мой скриптец для вализации CSV
14:07
py validate_capture.py "C:\Users\Kirill\work\retro\grid\boot 16.csv" 5 > "C:\Users\Kirill\work\retro\grid\boot 16_validate.txt"
формат примерно такой
первый аргумент - .CSV
второй (опционально) - с какой секунды искать помехи
14:07
вывод в stdout
14:07
формат примерно такой
28.468698375: dt = 63 < 100 at Channel 0, Channel 1!
28.727491063: dt = 63 < 100 at Channel 0, Channel 1!
28.748676938: dt = 63 < 100 at Channel 0, Channel 1!
28.748760812: dt = 62 < 100 at Channel 0, Channel 1!
28.868361125: dt = 62 < 100 at Channel 0, Channel 1!
14:08
я обратил на это внимание, когда анализировал очередную сессию
14:08
14:09
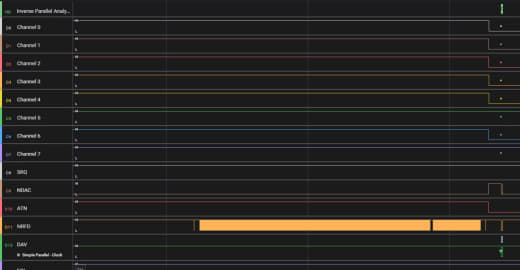
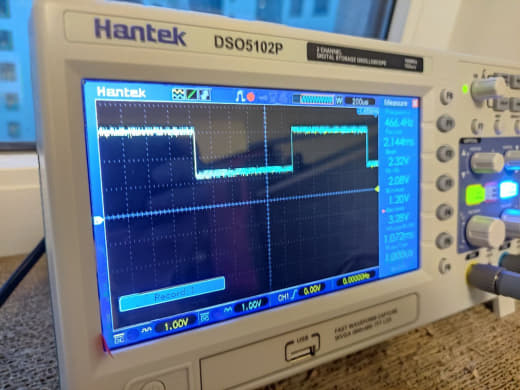
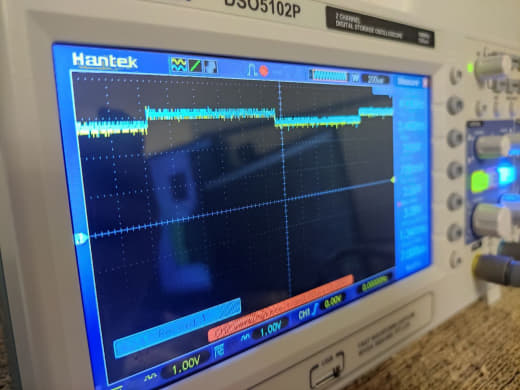
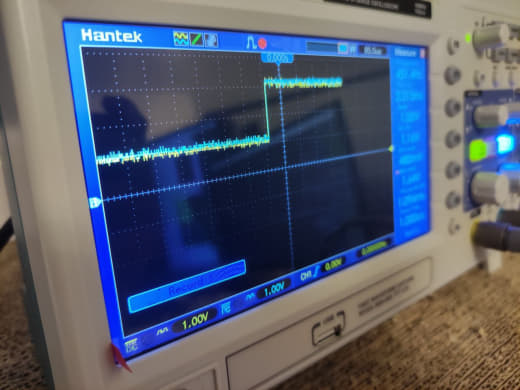
In reply to this message
здесь он на 6-й секунде попытался загрузить нулевой блок и сразу выдал ошибку
я полез разбираться - и попытался распарсить этот вывод с помощью другого скрипта
я полез разбираться - и попытался распарсить этот вывод с помощью другого скрипта
14:09
14:09
ему надо дать на вход .CSV файл и оригинальный образ - он сравнивает то, что было на линии лог анализатора с тем, что лежит в образе
u
14:10
usernameak
и дай угадаю, там однобитная ошибка?
KL
14:10
Kirill Leyfer
и короче этот скрипт ругнулся на 0 блок - нашёл несовпадение
14:10
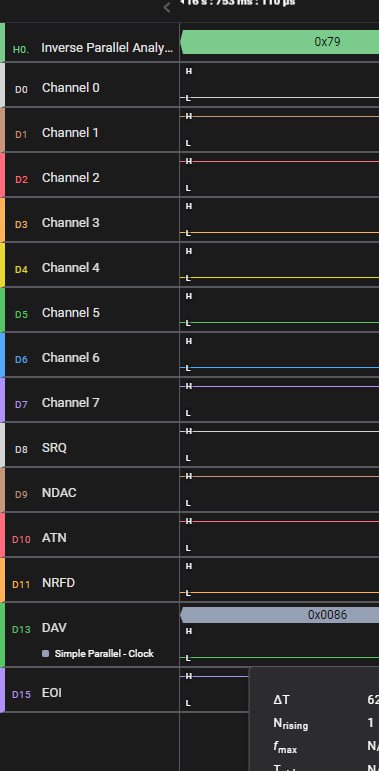
Data mismatch at 2: sent 0x79, has 0x73 in block!
14:10
там помеха на линии DAV!
14:11
метка времени - 16.753118125
u
14:11
usernameak
мне даже интересно стало
14:11
какие логические уровни у грида
KL
14:11
Kirill Leyfer
14:12
In reply to this message
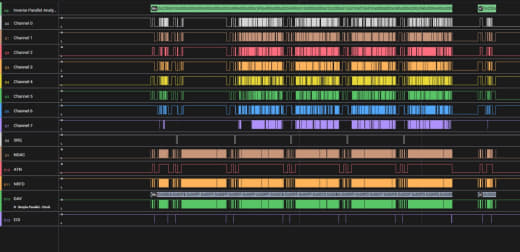
вот, видишь
из-за этого парсер (и, вероятно, грид тоже) прочитали два раза 0x79 хотя по протоколу там 0x73
из-за этого парсер (и, вероятно, грид тоже) прочитали два раза 0x79 хотя по протоколу там 0x73
14:12
так что надо копать в сторону более надёжного соединения)
14:13
короче вовремя я осциллограф купил
u
14:13
usernameak
судя по поведению тут не совсем даже в соединении дело
KL
14:13
Kirill Leyfer
жаль, что у меня реального флопика больше нет, не посмотреть нормальную загрузку
u
14:14
usernameak
In reply to this message
возможно помехи вызваны каким-то дополнительным внешним фактором
KL
14:15
Kirill Leyfer
🤷♂️
u
14:15
usernameak
слушай, а какие логические уровни у грида таки?
KL
14:18
Kirill Leyfer
да хрен его знает, надо осциллом ткнуть
14:18
на выходных ткну, сейчас надо бежать
Y
20:29
YL3AKC
Уровни на ГПиБ 5 вольтовые. Но, судя по спецификаций мокросхем, всё, что больше 2 вольт, считается как логическое 1 (пассивный уровень по терминологий ГПиБ).
20:30
Есть идея где то потыкать осликом чтоб посмотреть форму.
20:31
62.5 наносекунд - это эквивалент 16 мегасамплами на анализаторе. Тоесть 16 мегагерц частота.
20:34
В старых сесиях (2. недели назад), я на глаз не замечал колбасу на такой частоте. Если узранавлиаятся линий данных и после 62.5 наносекнуд устанавлиаятся например ДАВ линия то это +/- OK. С другой стороны, дигналы не могут колбасить быстрей 250 наносекунд, ибо такая частота у контроллера ГПиБ в ГРиДе.
20:34
Ладно, пора смотреть запись стрима.
20:35
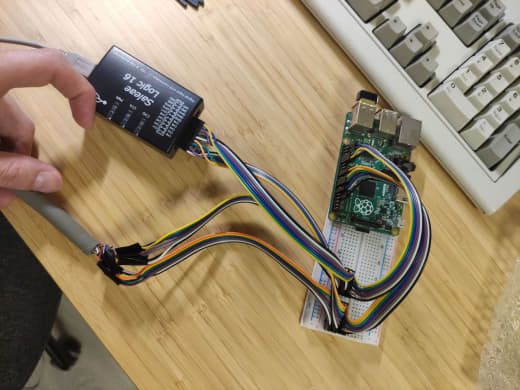
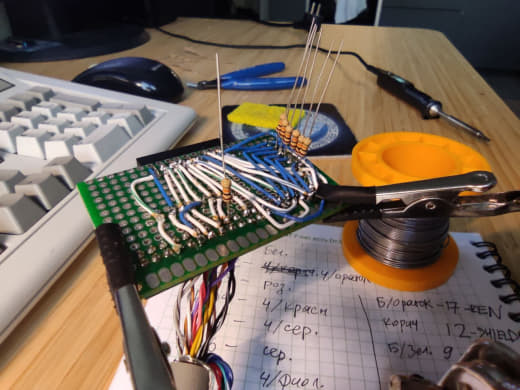
Чтоб уменьшить вероятность проблем с проводами, придется что-то красиво спаять и сделать красивые кабели и штепсельи.
KL
21:45
Kirill Leyfer
In reply to this message
щас всё на бредборде расфигачено, очень некрасиво и не помехоустойчиво, увы
Y
22:05
YL3AKC
Некрасиво - это не проблема. Помехоусточево. Ну не так страшно. Бывает и по хуже. Тут вашна качество бредборда и качество контактов на ней. При 1 мегагерце может начать вылезать влияния бредборда.
Я бы спаял всё на "дырчытый" макетке, похожей на то, что делал для нокиа 3310. Ну и гребенки от шкеыфов для флокипов/винчестеров. Весде где возможно на плоских надо последовательность: земля - сигнал - земля - сигнал - земля итд. Или просто витами парами, где один провод -земля, другой сигнал. Получится дофига заземплений, но - так надо.
Не красивые провода как можно короче. Это больше по теме монтажника не электронщика. А там свои законы и понтия.
Геморойно, скучно, времязатратно, но... У тебя теперь новых паяльник!
Я бы спаял всё на "дырчытый" макетке, похожей на то, что делал для нокиа 3310. Ну и гребенки от шкеыфов для флокипов/винчестеров. Весде где возможно на плоских надо последовательность: земля - сигнал - земля - сигнал - земля итд. Или просто витами парами, где один провод -земля, другой сигнал. Получится дофига заземплений, но - так надо.
Не красивые провода как можно короче. Это больше по теме монтажника не электронщика. А там свои законы и понтия.
Геморойно, скучно, времязатратно, но... У тебя теперь новых паяльник!
22:14
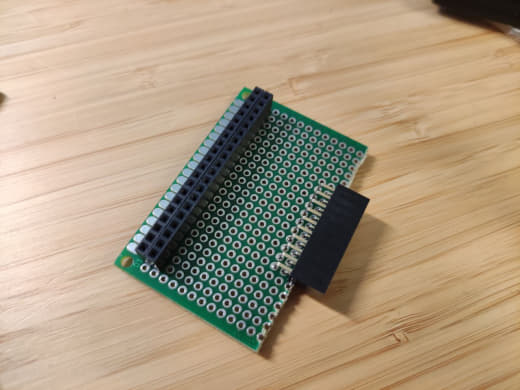
Идеально, конечно, всё сделать на одноы платке.
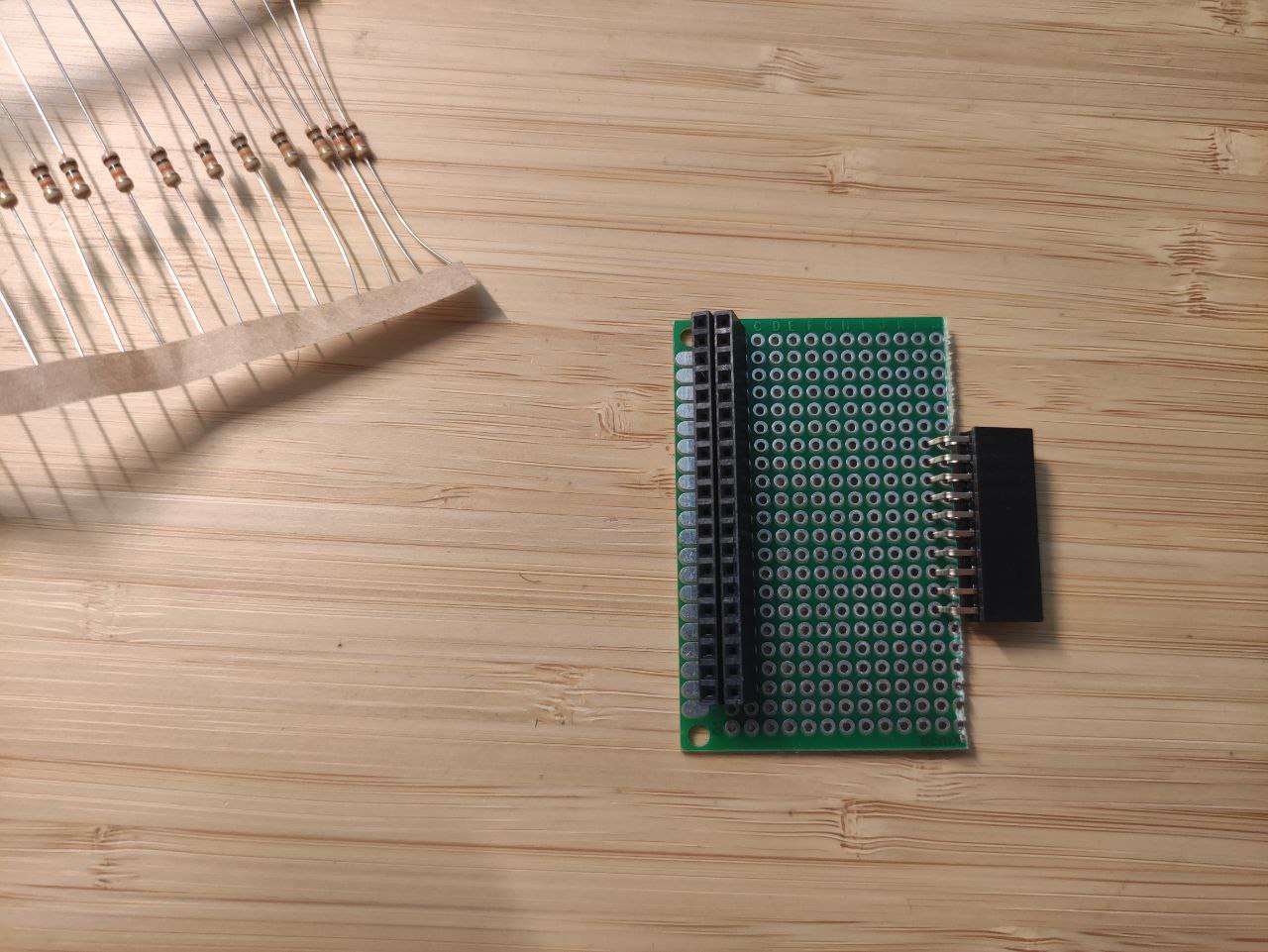
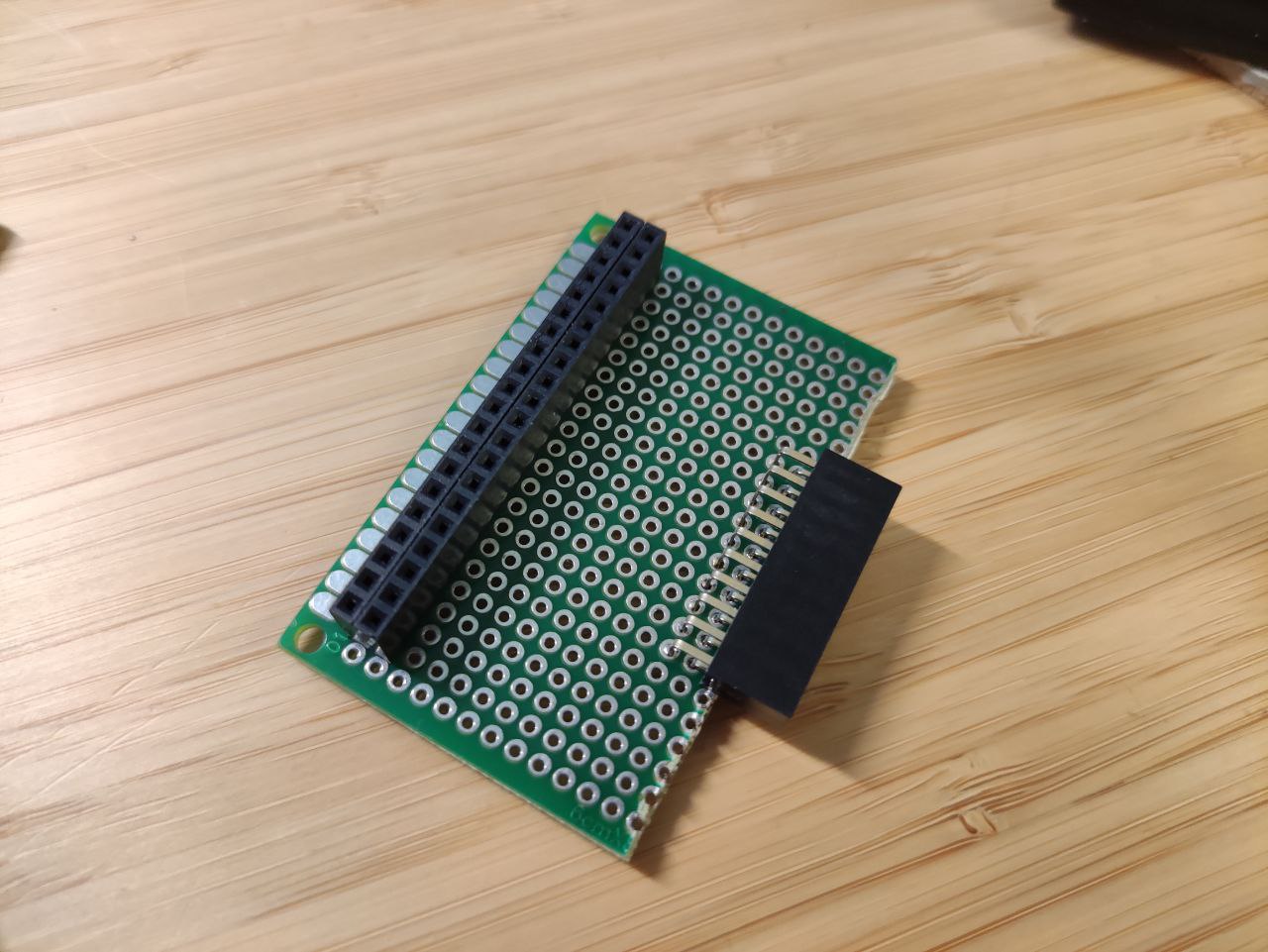
План таков:
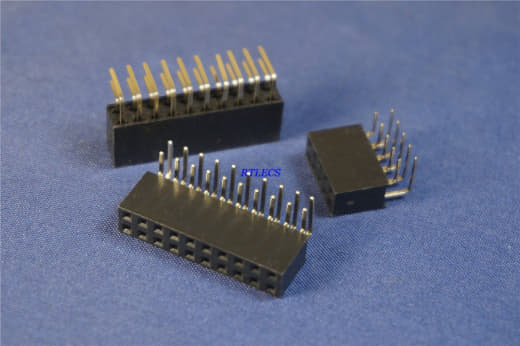
на платке напаиваем
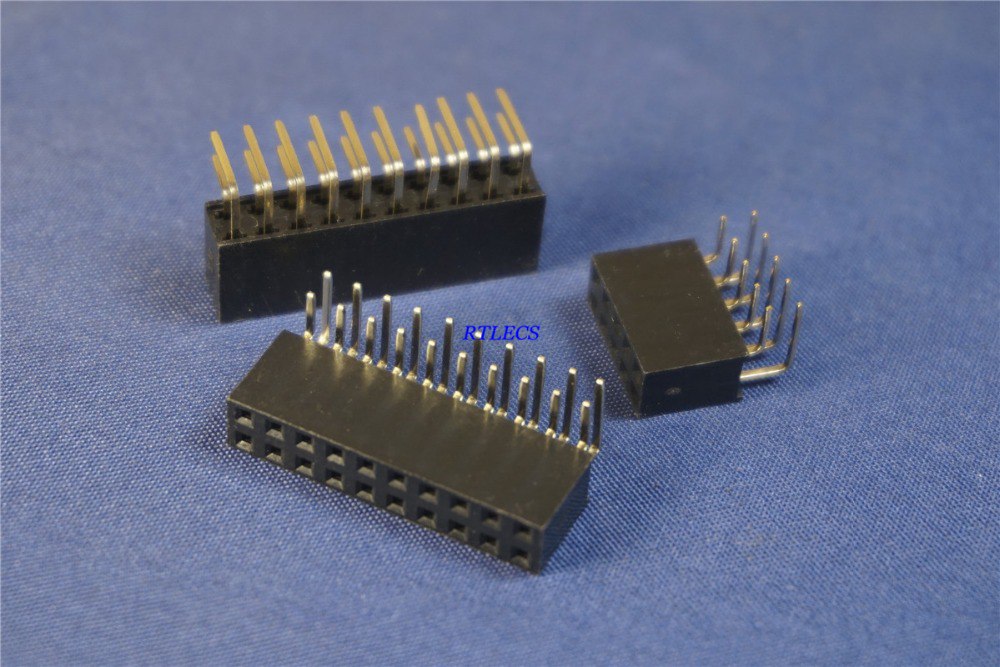
40 миновую гребенку - мама для малинки
16+ Гребенку - папа для шлейфа на логический анализатор.
24 гребенку - папа для ГРиБ шлеифа
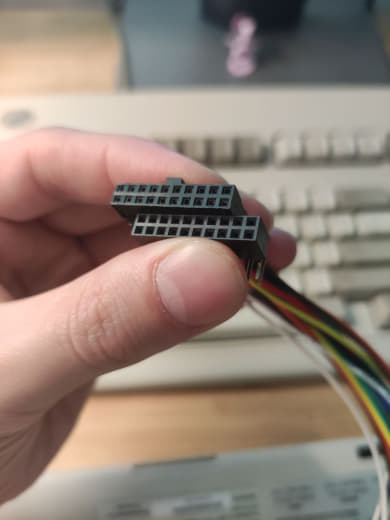
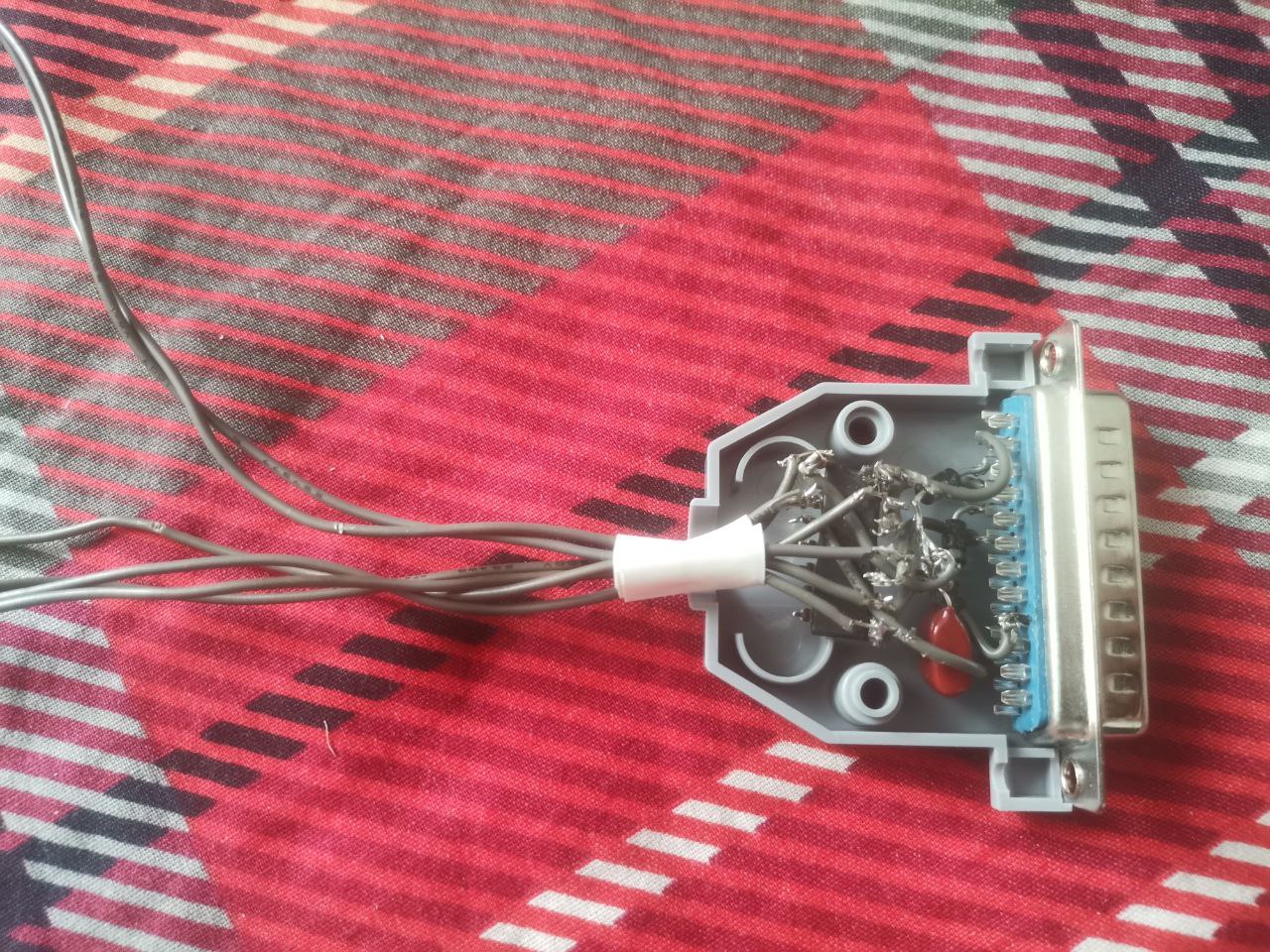
ГРиБ шлейф с штепселем вырываем оз ГРиД 1129 - ком по любому пока не работает.
Ну а дальше много пайки. Можно не красиво, но с короткими проводами во все стороны.
В таком раскладе будет минимум мусора на столе. Будет болтатся только 2 гажета: малинка и логический анализатор. Ну и большой, толстый... Не, не не то что вы подумальи, ГПиБ кабель от малинки на ГРиД.
План таков:
на платке напаиваем
40 миновую гребенку - мама для малинки
16+ Гребенку - папа для шлейфа на логический анализатор.
24 гребенку - папа для ГРиБ шлеифа
ГРиБ шлейф с штепселем вырываем оз ГРиД 1129 - ком по любому пока не работает.
Ну а дальше много пайки. Можно не красиво, но с короткими проводами во все стороны.
В таком раскладе будет минимум мусора на столе. Будет болтатся только 2 гажета: малинка и логический анализатор. Ну и большой, толстый... Не, не не то что вы подумальи, ГПиБ кабель от малинки на ГРиД.
22:14
Всё культурно, жестко, красиво, и оригинальные коннекторы от ГРиДа не пострадает.
22:25
К стати, есть не большая вероятность что либо код флопика, либо код управления пинамы что-то мутит и не корректо дергает пины.
Вообщем-то достаточно много не известных перемен, которые надо редуцировать.
Вообщем-то достаточно много не известных перемен, которые надо редуцировать.
22:26
@Megabozyakorovka А если я нарисую платку для макетки чтоб потом легче спаять?
KL
23:06
Kirill Leyfer
In reply to this message
Это кстати оч крутая идея! Надеюсь, там шаг такой же, прям пойду чекну сейчас
23:07
In reply to this message
Выдернуть шлейф из 1129 тоже мысль. Но в конечном итоге надо что-то более реальное придумать, чтоб любой мог себе собрать
Y
23:09
YL3AKC
In reply to this message
Ну... Покупка ГПиБ штепселя и штатный провод. Пока вета версия, нет сысла думать о конечной версий.
А так, да. Нарисовать платку, чтоб народ в америкостане мог сам заказать и спаять.
А так, да. Нарисовать платку, чтоб народ в америкостане мог сам заказать и спаять.
KL
23:12
Kirill Leyfer
In reply to this message
У меня щас, в принципе, есть кабель, который я частично раздербанил чтоб припаять к нему провода от макетки. Кто мне мешает его и запаять на этот дырчатый бредборд
Y
23:12
YL3AKC
In reply to this message
Дай пинаут на переходник от ГРиДа (надо будет побикать) и пинаут от логического анализатора. Попробую нарисовать платку, которую можно будет легко спаять.
KL
23:12
Kirill Leyfer
Блин, идея с нашлепкой для пихи это прям огонь
Y
23:13
YL3AKC
пихи?
23:16
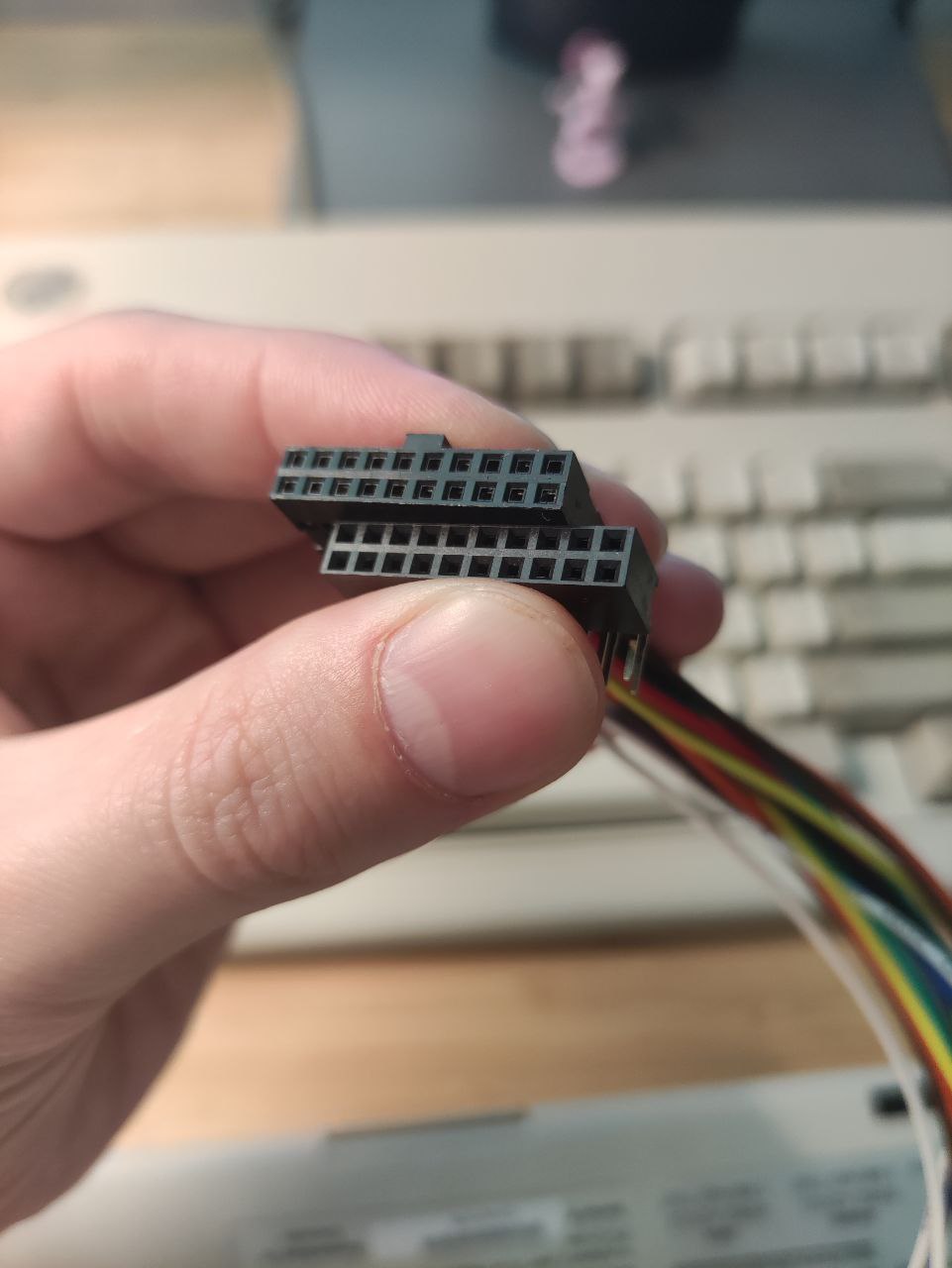
Так. На ГРиДовском переходнике 2х12 гребонка. Только надо знать как соеденить. Надо табличку где расписаны номера на гребенке и на штепселе ГПиБ.
KL
23:17
оно?
23:18
у меня такой готовой нет, к сожалению
Y
23:18
YL3AKC
In reply to this message
Да, но это для малинки. Мне надо знать оба конца на том ГРиБ пиптике, которы находится внутри ГРиДа. Ну и пинаут логического анализатора.
KL
23:19
Kirill Leyfer
А, ещё и пинаут шлейфа гридовского... Я всё-таки думаю не вытаскивать шлейф, в припаять к бредборду кабель
23:19
потому что у кабеля разъём унисекс - его можно и в грид вставить и в него чёнить вставить
Y
KL
23:19
Kirill Leyfer
так я уже
23:20
но там все изменения обратимы
Y
23:20
YL3AKC
Понятно!
23:21
Сча. Посмотрю видос про солнемобилей от Темной фазы (Привет Питер!). И займусь делом.
KL
23:21
Kirill Leyfer
Выглядит как-то так
Y
23:22
YL3AKC
In reply to this message
Вроде не четко, но виден пинаут анализатора. Кинь в телеграм картинку без сжатия.
KL
23:32
ну а назначение каждой линии конкретно в моём случае тоже простое, ты его мог видеть в записях сессий
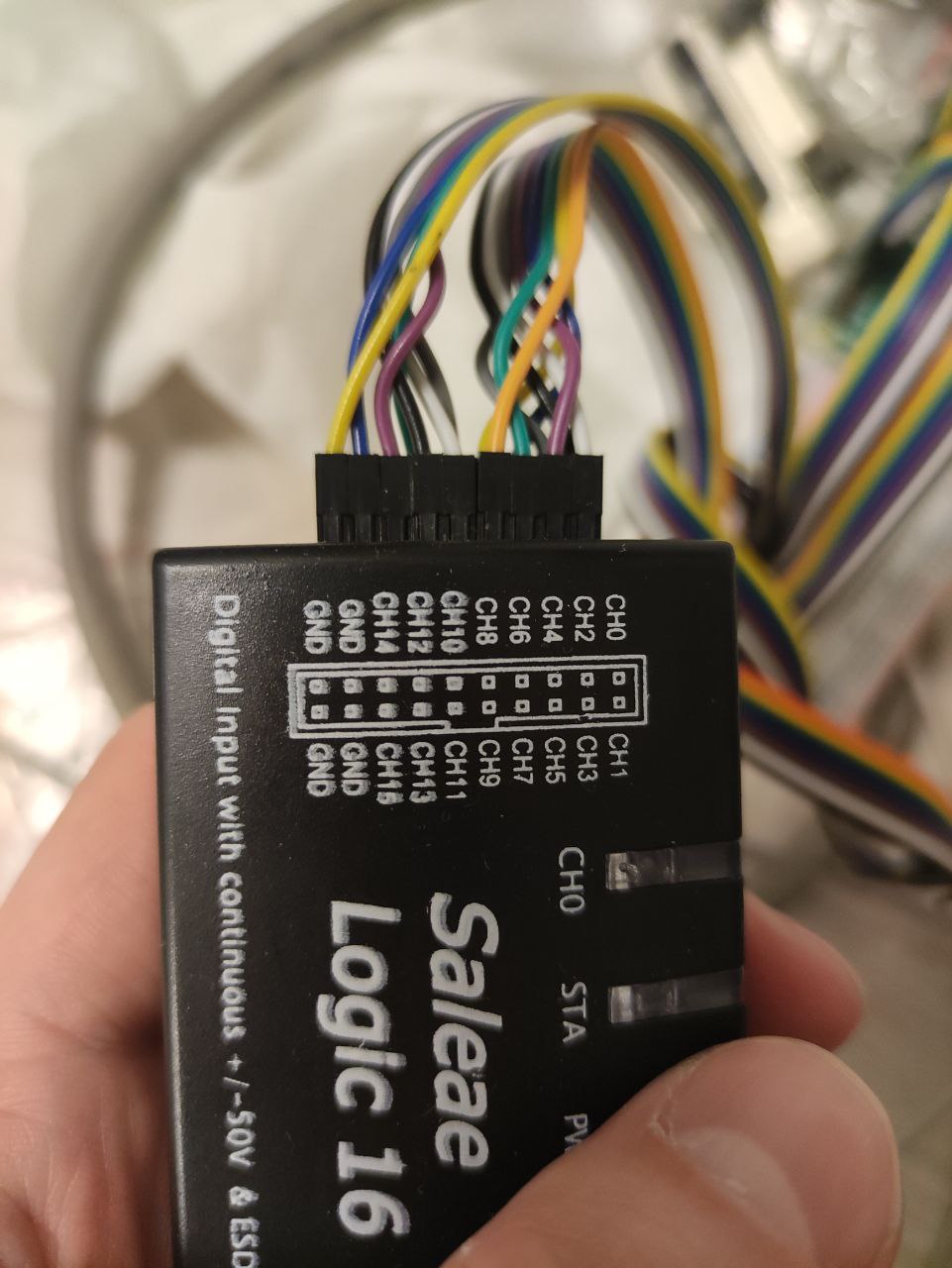
23:32
CH11 - NRFD и т.д.
Y
23:33
YL3AKC
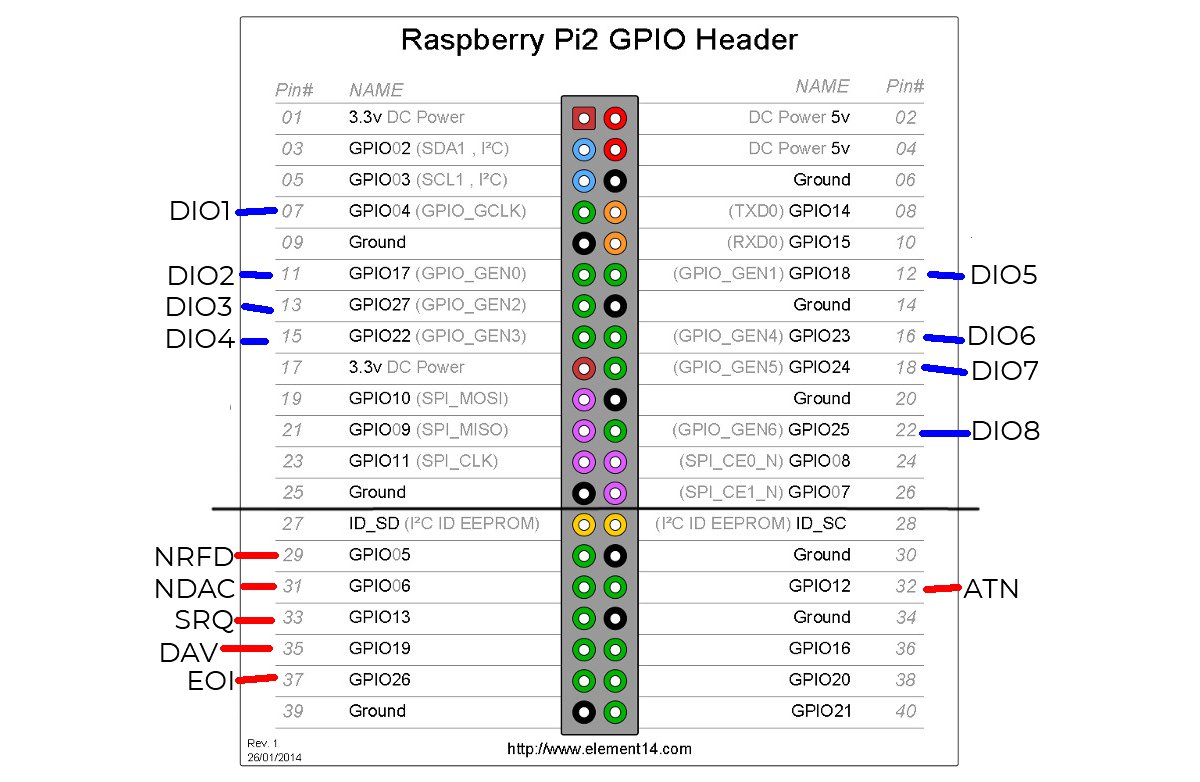
DIO1,DIO2,DIO3,DIO4,DIO5,DIO6,DIO7,DIO8,SRQ,NDAC,ATN,NRFD,IFC,DAV,REN,EOI
KL
23:33
Kirill Leyfer
да, но IFC и REN у меня не подключены
Y
23:34
YL3AKC
А pulseview не хочешь попробывать. Мне понравился декодер ГПиБ.
KL
Y
23:36
YL3AKC
Только придется переименовать Channel0 -Channel7 в DIO1 - DIO8. Так декодер сразу поймет все сигналы и кабдый раз не надо будет тыпать. По крайне мере я так делал при анализе CSV файлов.
KL
23:43
Kirill Leyfer
А, хорошо
Y
23:45
YL3AKC
Разположение такое?
23:46
С точки зрения удобство.
KL
23:48
Kirill Leyfer
In reply to this message
посередине GPIB?
Возможно, его тоже стоит сделать в 2 ряда, чтобы расположение контактов на плате совпадало с распиновкой разъёма
ну, я только не знаю, будет ли от этого польза.. Если нет - то и нет
Возможно, его тоже стоит сделать в 2 ряда, чтобы расположение контактов на плате совпадало с распиновкой разъёма
ну, я только не знаю, будет ли от этого польза.. Если нет - то и нет
Y
23:50
YL3AKC
In reply to this message
Да, по середине провода от ГПиБ кабеля. Очищается и на прямую припаивается к плате.
Попробую и в 2 ряда, тут главное поигратся и толково соеденение провести чтоб легче паять.
Попробую и в 2 ряда, тут главное поигратся и толково соеденение провести чтоб легче паять.
23:52
Возмовно провода ГПиБ не поидет в нормальной последовательности. Тут компромис: либо удобно на плате паять, либо легко кабель ГПиБ подвести.
23:53
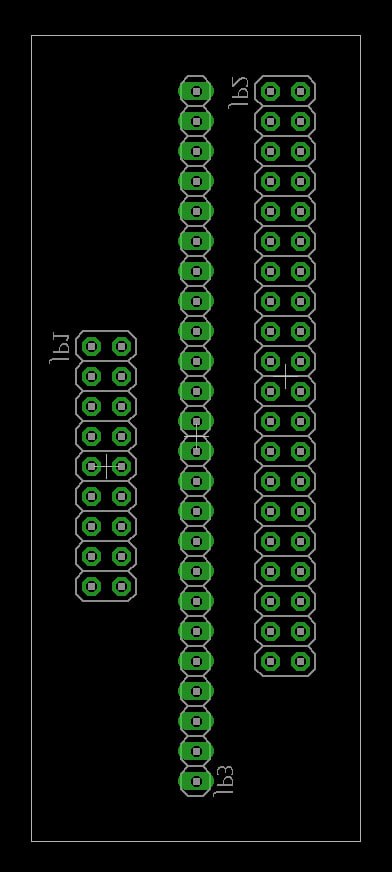
Не обращаем внимание на зеркальный текст! Так надо из за специфики софта.
11 June 2023
ВЗ
01:15
Владислав Задорожкин
Во у вас тут раскопки
Y
ВЗ
01:16
Владислав Задорожкин
Причины неработоспособночти эмулятора
Y
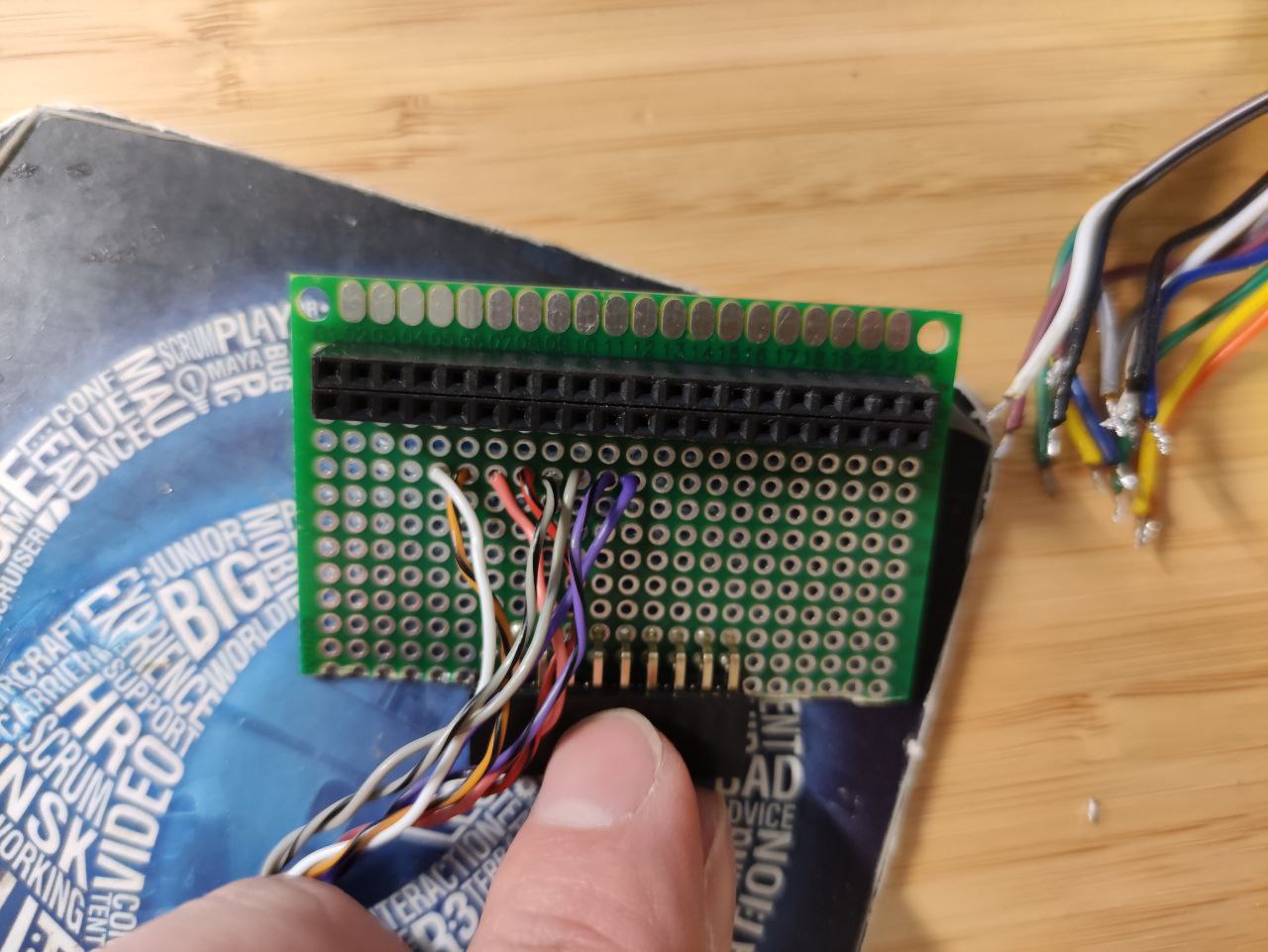
Y
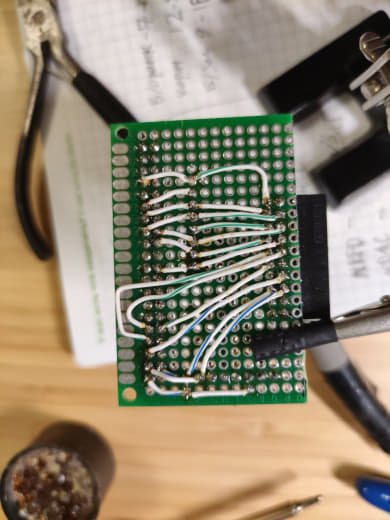
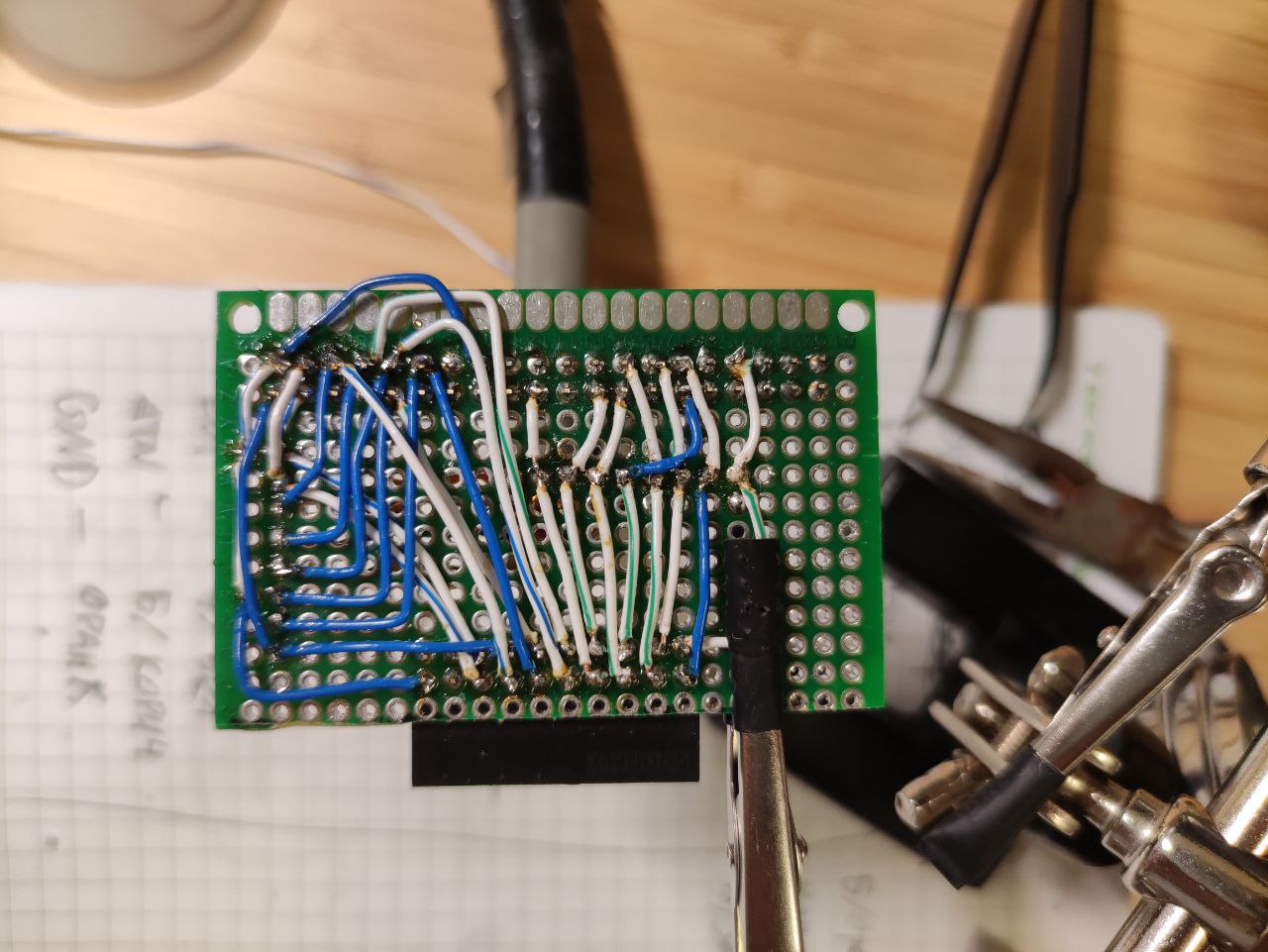
03:59
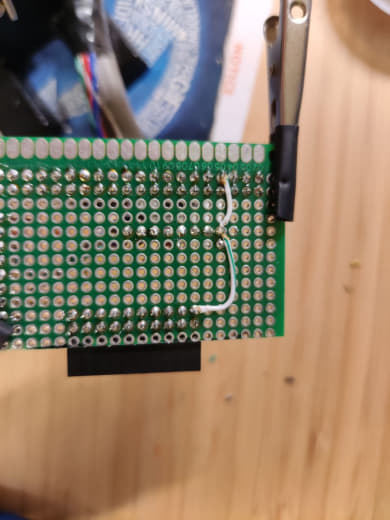
Все провода с веху.
Все гребенки с низу.
1. Припаять гребенку-мама для малины
2. Припаять гребенку-папа для анализатора
3. Припаять синие провода
4. Припаять красные провода
5. Прочистить 7-10 см ГПиБ провода и припаять.
Все гребенки с низу.
1. Припаять гребенку-мама для малины
2. Припаять гребенку-папа для анализатора
3. Припаять синие провода
4. Припаять красные провода
5. Прочистить 7-10 см ГПиБ провода и припаять.
04:01
"Я так вижу!"
По моему оптимально у удобно для пайки.
По моему оптимально у удобно для пайки.
04:04
А если для анализатора поставить 90 градусную гребенку-мама, то еще круче получаться.
Y
05:18
YL3AKC
Есть вероятность что и анализатор врёт. Частота семплинга 16 Мегагерц (62.5 наносекунд). Всё, что меньше 250 наносекунд почти всегда проглатывает.
05:18
Судя по стриму, в некоторых местах не важно что там дергается.
05:19
Надо посмотреть на битые данные.
05:19
Было бы не плохо и осликом посмотреть как жестко изменяется логические уровни.
05:20
Да и отсутствие штатных ГПиБ микросхем может влиять.
05:21
Ну да ладно. Начнем с железа. Следующий стрим будет паяние платки? 😀
05:26
Обана. И в стриме тоже порекомендовальи взять осцлик и потыкать линий...
05:27
Навеное надо с начала посмотреть стрим а только потом писать комменты.
Y
05:42
YL3AKC
Осцилограф, конечно хорошо, но с начало луче спаять платку.
05:43
А если и это не поможет, то придется ставить штатные микросхемы драйвера ГПиБ.
Y
06:40
YL3AKC
@Megabozyakorovka Надо поговорить о том куске кода, который ты взял из чата. Придется детально объяснить что такое Pull-up.
06:45
И, похоже надо поставить резисторы-терминаторы на шине. Только pull-up сильно не надежно.
Вполне возмовно, чтп во время перекючения пина из входа на выход иногда пояюляется шумы.
Вполне возмовно, чтп во время перекючения пина из входа на выход иногда пояюляется шумы.
KL
08:44
Kirill Leyfer
Вопрос
Может, оплетку гриб кабеля на землю подключить? Поможет?
Может, оплетку гриб кабеля на землю подключить? Поможет?
Y
08:45
Скинь последний код из файла g210x.cpp
08:46
посмотрю что там с управлением пинов.
KL
08:47
In reply to this message
Да, спасибо, потому что я вообще по нулям
Скажи где можно почитать или посмотреть об этом
Скажи где можно почитать или посмотреть об этом
Y
08:48
YL3AKC
Хмм... Ну с начало мовно почитать какой небуть гайд по пинам на ардуинке. Там тот-же принцып относительно Pull-up.
KL
Y
08:50
YL3AKC
Или придется самому рисовать схемочку-туториал.
08:55
Ладно!
Как плата? Спаяешь? Туториал по ослику надо?
Как плата? Спаяешь? Туториал по ослику надо?
KL
08:56
Kirill Leyfer
Плату спаяю! Туориал пока не могу сказать, сначала мануал изучу, там ясно будет. В универе работал с осциллографом, но уже все забыл
08:57
Так, наконец-то понял чё такое pull-up
Нашёл видео для тупых
Чтоб вы понимали, в формате shorts
То есть когда все уже совсем безнадёжно
https://youtu.be/y_QIEyC-uUk
Нашёл видео для тупых
Чтоб вы понимали, в формате shorts
То есть когда все уже совсем безнадёжно
https://youtu.be/y_QIEyC-uUk
Y
08:57
YL3AKC
А, ну тогда вспомнишь. Разберёшься.
08:58
Вот тут может быть и надо поэкспериментировать:
bool GPIO_IF_passive(uint8_t pin) {
gpioSetMode(pin, PI_INPUT);
gpioSetPullUpDown(pin, PI_PUD_UP);
return !((bool)gpioRead(pin));
}
void GPIO_IF_active(uint8_t pin) {
gpioSetMode(pin, PI_OUTPUT);
gpioWrite(pin, state);
}
08:58
Поменять местрами 1. и 2. строчки.
KL
09:24
Kirill Leyfer
In reply to this message
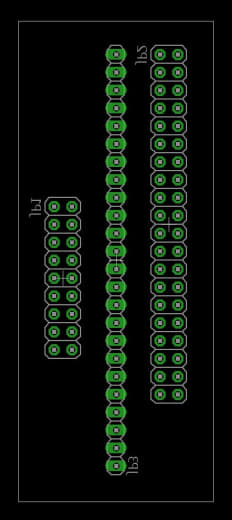
так, ещё раз по гребёнкам
RP1 - это на пишку
JP1 - это просто гребёнка-папа для, может быть, подключения осциллографа?
JP3 - JP2 - это для GPIB?
И крайняя справа - это для лог анализатора?
RP1 - это на пишку
JP1 - это просто гребёнка-папа для, может быть, подключения осциллографа?
JP3 - JP2 - это для GPIB?
И крайняя справа - это для лог анализатора?
09:25
In reply to this message
так, а "все гребёнки снизу" - а они не будут задевать саму пишку?
Я думал, что гребёнка-мама для пишки - снизу
а остальные - сверху
(правда, тогда непонятно, как припаивать провода)
Я думал, что гребёнка-мама для пишки - снизу
а остальные - сверху
(правда, тогда непонятно, как припаивать провода)
Y
09:31
YL3AKC
In reply to this message
Все гребенки с низу. Но если для логического анализатора найдешь 90 градусную маму, то круто.
Не будут задевать. Там рядом сама пишка чтоб понять как плата ставится. По сути плата выпирает в сторону от пишки.
Для ГПиБ вроде нарисованы гребенки, но на самом деле туда на прямую подпаивается провода из кабеля.
Я паять надо с веху. Да, так специально нарисовано.
По скольку там много соединений, все провода надо с изоляций.
И паять в 2 захода. С начало те, которые синим нарисованы, потом красным. Так будет на много удобней и понятней.
Не будут задевать. Там рядом сама пишка чтоб понять как плата ставится. По сути плата выпирает в сторону от пишки.
Для ГПиБ вроде нарисованы гребенки, но на самом деле туда на прямую подпаивается провода из кабеля.
Я паять надо с веху. Да, так специально нарисовано.
По скольку там много соединений, все провода надо с изоляций.
И паять в 2 захода. С начало те, которые синим нарисованы, потом красным. Так будет на много удобней и понятней.
09:33
Провода от ГПиБ. можно с низу просунуть и припаять с верху.
Размеры подогнаны пос шаг дырочек макетки. Сетка на 2. картинке тоже подогнана под шаг на макетки.
По сути можно подсчитывать в которую дрырку ставить гребенки.
Размеры подогнаны пос шаг дырочек макетки. Сетка на 2. картинке тоже подогнана под шаг на макетки.
По сути можно подсчитывать в которую дрырку ставить гребенки.
KL
09:37
Kirill Leyfer
понял! А что у тебя отмечено как JP1?
Y
09:40
YL3AKC
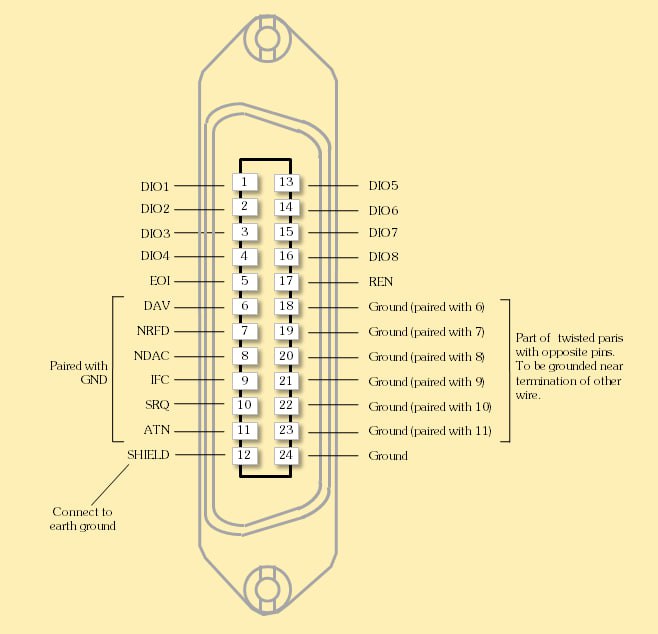
JP1 - линий данный DIO1-DIO8
JP2 - линий управления у которых в паре есть земля (Скручено в пару с землей).
JP3 - Те линий, которым нет в паре скрутки, но туда надо подключить оставшися GND и Shield.
JP2 - линий управления у которых в паре есть земля (Скручено в пару с землей).
JP3 - Те линий, которым нет в паре скрутки, но туда надо подключить оставшися GND и Shield.
09:42
Первым делом припаяй на место гребенки малины и анализатора.
Потом провода от кабеля ГПиБ.
И только потом маленькими монтажными проводами соединяй всё.
Потом провода от кабеля ГПиБ.
И только потом маленькими монтажными проводами соединяй всё.
KL
09:42
Kirill Leyfer
понял!
Y
09:42
YL3AKC
Плату советуется зажать в что-то. Например тиски, если есть. Так легче паять.
KL
09:43
Kirill Leyfer
да, у меня есть третья рука или как там её
Y
09:43
YL3AKC
Потом просто смотришь на картинку и паяешь один к одному. Не надо ломать голову относительно зеркальности.
09:46
Есть опасения, что к всем линиям надо будет припаять резисторы. Так называемые внешние пулл-апы и терминаторы линий.
16 штук
примерно 5 - 10 килоом.
Одним концом на линию, а аторой конец на 5 вольт на малинке.
получется 16 сояших фингей.
16 штук
примерно 5 - 10 килоом.
Одним концом на линию, а аторой конец на 5 вольт на малинке.
получется 16 сояших фингей.
09:47
Но об этом потом...
09:49
Для монтажа мовно изпользовать жесткий провот 5 категоий. От одножыльный.
Один конец припаял куда надо. провел до второго конца.
Откусил.
Паяльником подплавил на кончике изоляцию и припаял.
Будет все провода нужной длинны и не чего лишнего не будет болтаться. И Красиво.
Один конец припаял куда надо. провел до второго конца.
Откусил.
Паяльником подплавил на кончике изоляцию и припаял.
Будет все провода нужной длинны и не чего лишнего не будет болтаться. И Красиво.
09:50
А так же будет доступ к любой линий для ослика.
KL
09:57
Kirill Leyfer
In reply to this message
у меня был негативный опыт, очень легко слезает изоляция
у меня лежит раздербаненный IDE кабель
могу его использовать для пайки - он помягче и изоляция по моему опыту не так сильно горит и слезает
у меня лежит раздербаненный IDE кабель
могу его использовать для пайки - он помягче и изоляция по моему опыту не так сильно горит и слезает
09:58
хотя попробую, одножильный 5 кат. тоже лежит
09:59
так, все гребёнки вроде бы нашёл где купить, осталось пойти поесть и потом сгонять за ними в магаз
Y
09:59
YL3AKC
In reply to this message
У тебя теперь паяльник с теморегуляций. При правильной температуре и паять будет и изоляция не сползет. Сразу...
KL
Y
KL
Y
KL
10:01
Kirill Leyfer
не, столько нет, хорошо, возьму ещё пачку
10:04
In reply to this message
кстати предвкушая выпаивание гребёнок, взял такую штуку
https://aliexpress.ru/item/1005001814957108.html?spm=a2g2w.orderdetail.0.0.548c4aa6aJKeRR&sku_id=12000033415259535
https://aliexpress.ru/item/1005001814957108.html?spm=a2g2w.orderdetail.0.0.548c4aa6aJKeRR&sku_id=12000033415259535
10:04

10:05
отсос, только
1) Сам греет место пайки
2) вместо пружинки там соленоид. На кнопку нажал - он всосал
1) Сам греет место пайки
2) вместо пружинки там соленоид. На кнопку нажал - он всосал
Y
10:05
YL3AKC
Хмм. Пользовался похожими. С переменным успехом. С начало обязательно надо потреноратся.
KL
10:05
Kirill Leyfer
поэкспериментировал с ним - получается неплохо выпаивать
Y
10:05
YL3AKC
Терморегуляция?
10:05
Есть?
KL
10:05
Kirill Leyfer
нет(
10:06
я простые выводные элементы на тестовой плате повыпаивал
потом попробую на ней же выпаять кроватку для ROM чипа. Если удастся, то я готов)
потом попробую на ней же выпаять кроватку для ROM чипа. Если удастся, то я готов)
Y
10:07
YL3AKC
Примерно 100 Ваттный диммер для старой доброй лампы накаливания в магазе и мовно будет регулировать.
KL
10:07
Kirill Leyfer
а куда его вставлять, прям в провод питания врезать?
Y
10:08
YL3AKC
In reply to this message
Да, между розеткой 220 Вольт и паяльником.
Но это не сегодня. Без спешки. Пока только ГПиБ и продготвка к следующему стриму.
Но это не сегодня. Без спешки. Пока только ГПиБ и продготвка к следующему стриму.
KL
10:09
Kirill Leyfer
понял
да, хорошо
да, хорошо
Y
KL
14:55
Kirill Leyfer
In reply to this message
нет, вот только все запчасти вывалил
конечно же некоторые вещи купил не то что надо, не тот шаг - но брал с запасом разных наименований на всякий случай, так что я в порядке
конечно же некоторые вещи купил не то что надо, не тот шаг - но брал с запасом разных наименований на всякий случай, так что я в порядке
14:58
In reply to this message
Макетка чуть меньше чем на схеме, но вроде все ещё реально норм развести
Y
14:59
могу перерисовать и опримизировать
KL
15:00
Kirill Leyfer
да думаю что разберусь, спасибо!
15:00
так, ну что ж, ладно, пойду тогда сначала потренируюсь - надо для одного ноута Ni-MH батарею спаять
а потом займусь этой штукой
а потом займусь этой штукой
15:01
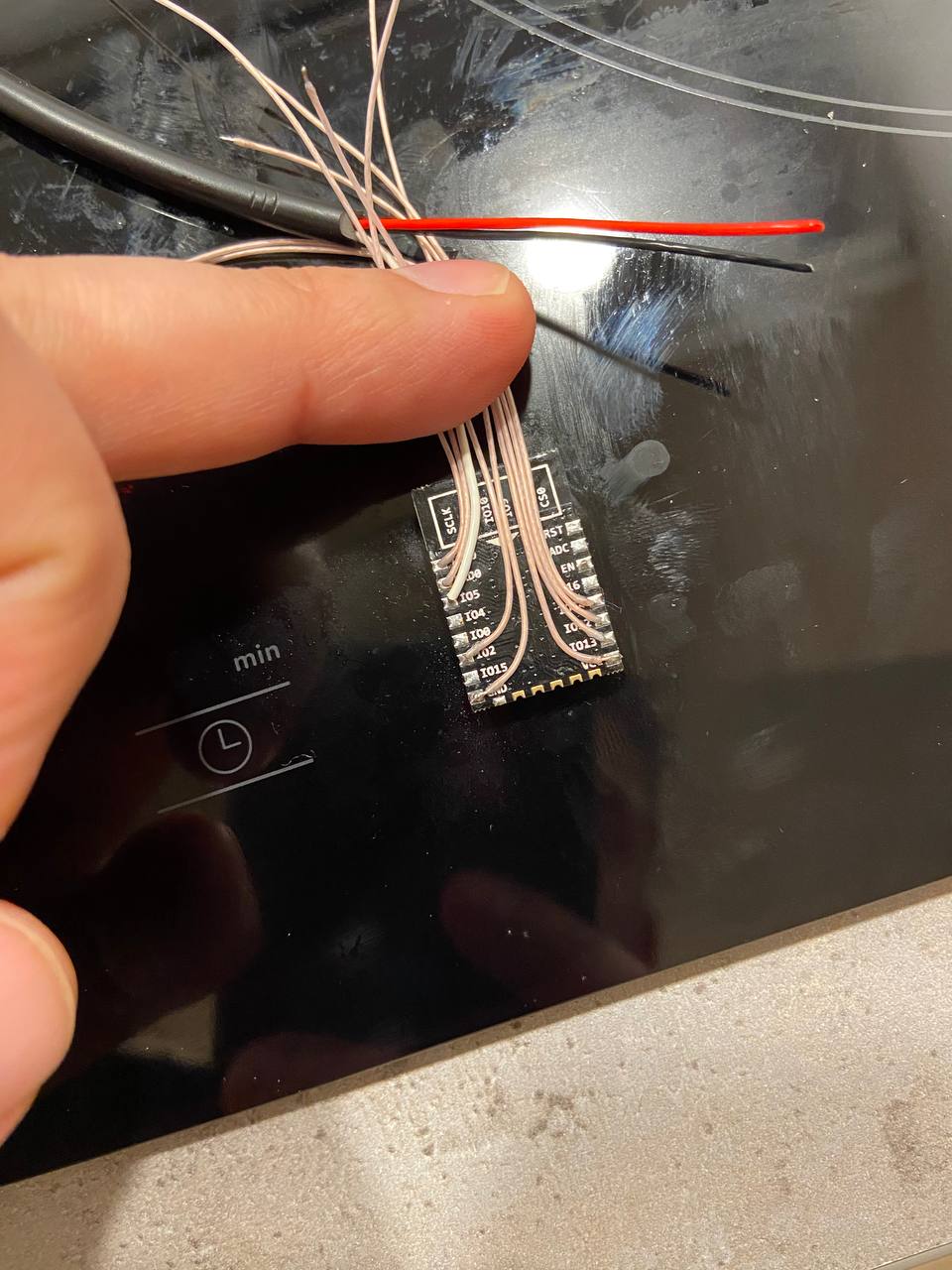
Колодка 1 в 1 как родная от анализатора. Разве что без ключа
ВЗ
KL
Y
15:03
YL3AKC
In reply to this message
у анализатора IDC колонка. мама только на плоский кабель.
А это pinhead. они совместимы.
А это pinhead. они совместимы.
ВЗ
Y
15:10
плату надо бы напильником или ножом подработать. для эстетики.
KL
15:32
Kirill Leyfer

Возникли непредвиденные трудности
Y
15:38
Ок, я в не зоне на пару часов.
15:38
.webp)
u
ВЗ
KL
18:58
Kirill Leyfer
Я же верно понял задумку?
18:58

KL
19:52
Kirill Leyfer
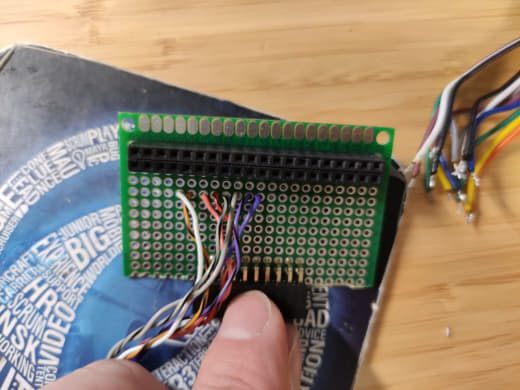
Процесс идёт
ВЗ
20:03
Владислав Задорожкин
А у меня тут пока своя пайка намечается, флешер собирать во вторник буду. Осталась только микросхема, корпус LPT и RJ45 разьем, чтоб в него вставлять насадки от UFS для DCT3
KL
20:17
Kirill Leyfer
Все ещё идёт...
ВЗ
20:19
Владислав Задорожкин
In reply to this message
Даа, правда я за нее знатно переплатил по глупости в свое время
Ну, зато спасает, номиналы проверять
А то когда на деталях +100500 разных вариантов кодификации, можно и головой тронуться
Ну, зато спасает, номиналы проверять
А то когда на деталях +100500 разных вариантов кодификации, можно и головой тронуться
KL
20:28
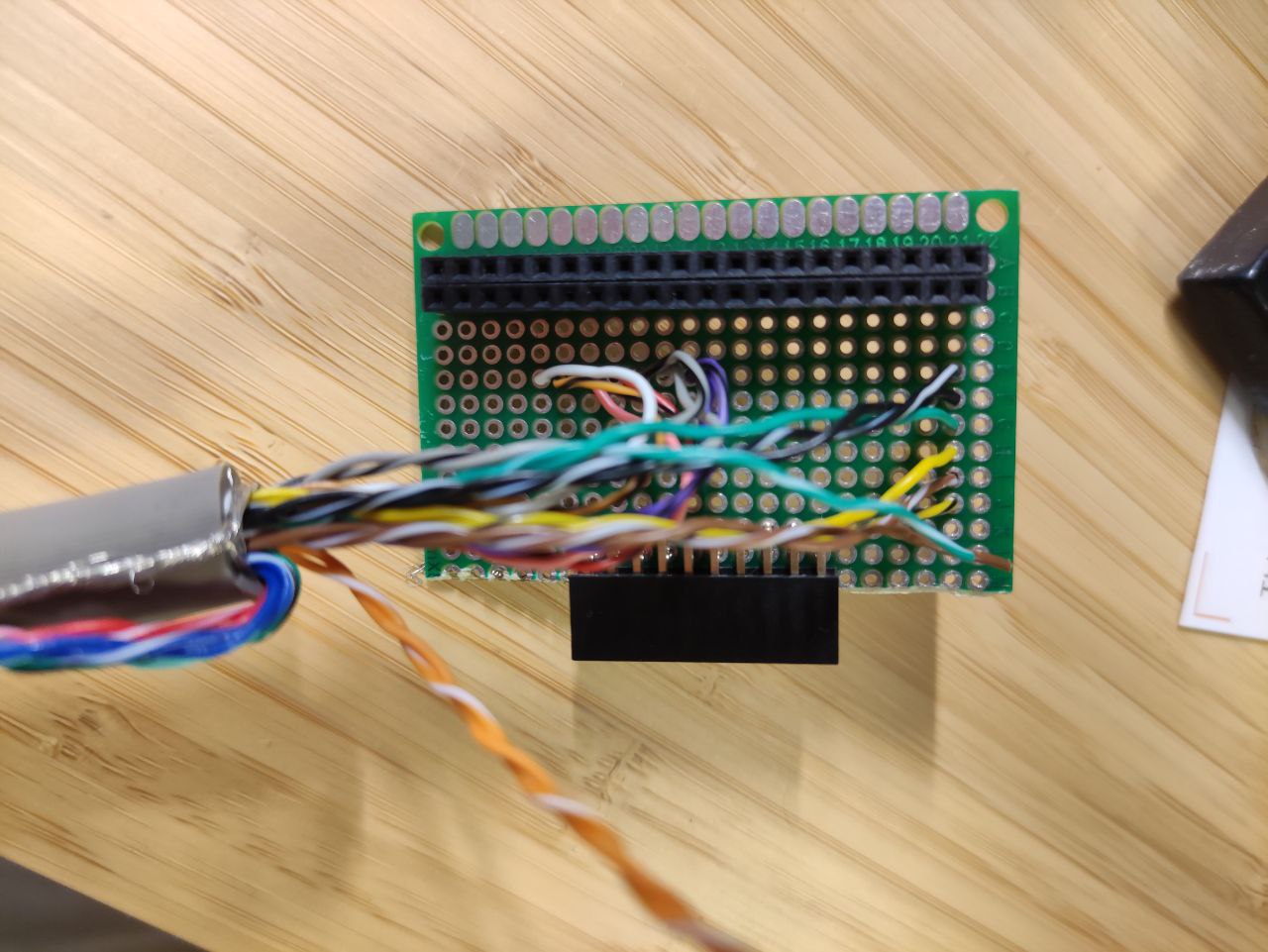
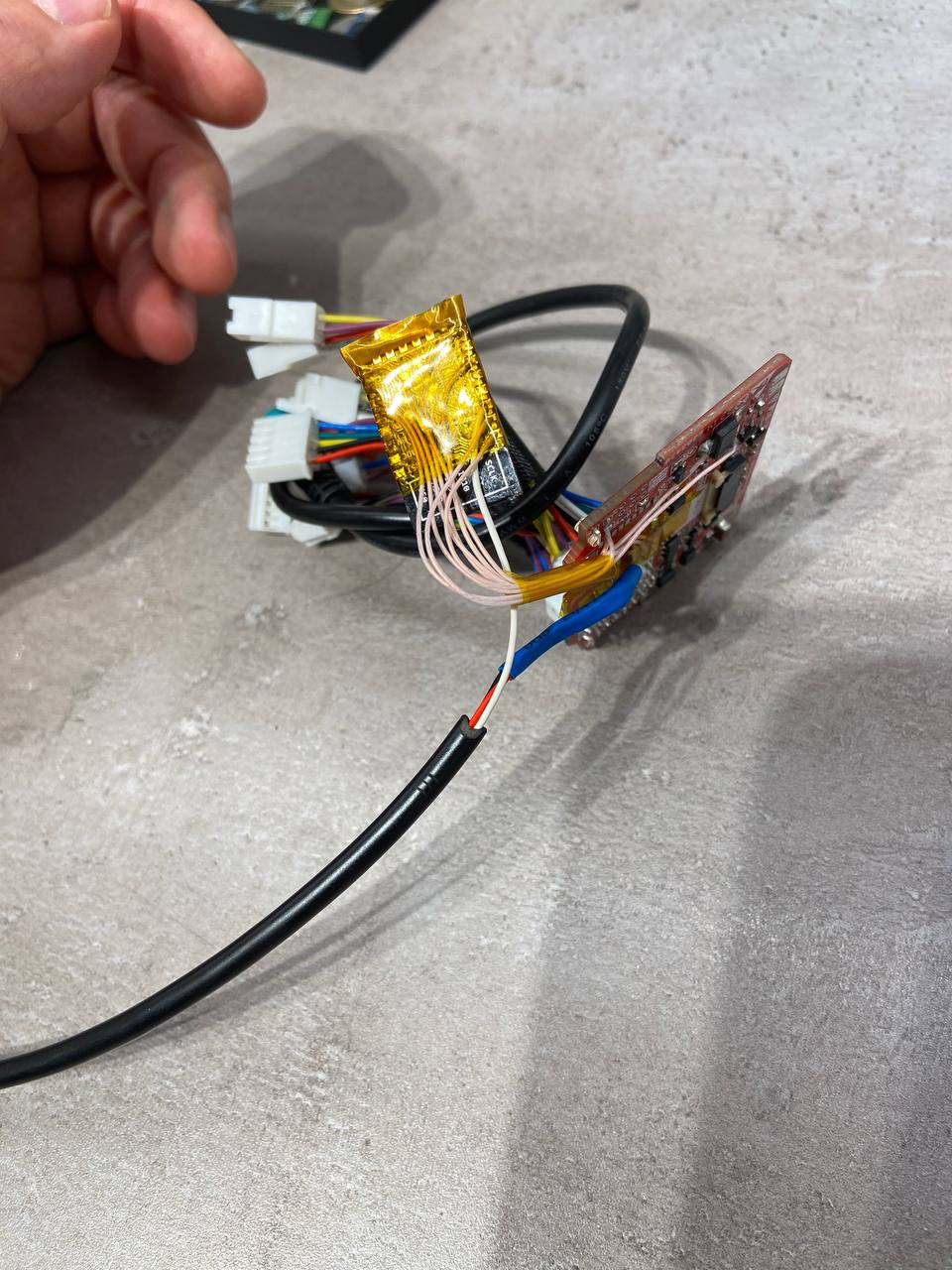
Kirill Leyfer
Короче у кабеля распиновка не совсем как на сайте
На сайте пишут, что сигнализация скручена в витые пары с землёй
А в кабеле витые пары сделаны как попало, NRFD в паре с NDAC и так далее
В любом случае, это не мешало передаче данных по этому кабелю, так что наверное это не критично
На сайте пишут, что сигнализация скручена в витые пары с землёй
А в кабеле витые пары сделаны как попало, NRFD в паре с NDAC и так далее
В любом случае, это не мешало передаче данных по этому кабелю, так что наверное это не критично
20:28
Y
KL
21:30
Kirill Leyfer
In reply to this message
Будут, чуть позже
А ты можешь скинуть исходники этой платки?
У друга есть CNC 2d штука, он ей может двухсторонние платы вырезать
Я вот думаю. Если сам не осилю запаять или будет не очень надёжно, то след версию можно будет с помощью этой штуки сделать
А ты можешь скинуть исходники этой платки?
У друга есть CNC 2d штука, он ей может двухсторонние платы вырезать
Я вот думаю. Если сам не осилю запаять или будет не очень надёжно, то след версию можно будет с помощью этой штуки сделать
Y
21:35
YL3AKC
In reply to this message
Да, могу. У меня Eagle 7.7 soft. Могу сразу в .DXF или как .ZIP для PCBWay/JLCPCB.
Немного по пожже.
Немного по пожже.
KL
21:37
Kirill Leyfer
Спасибо!
KL
21:59
Kirill Leyfer
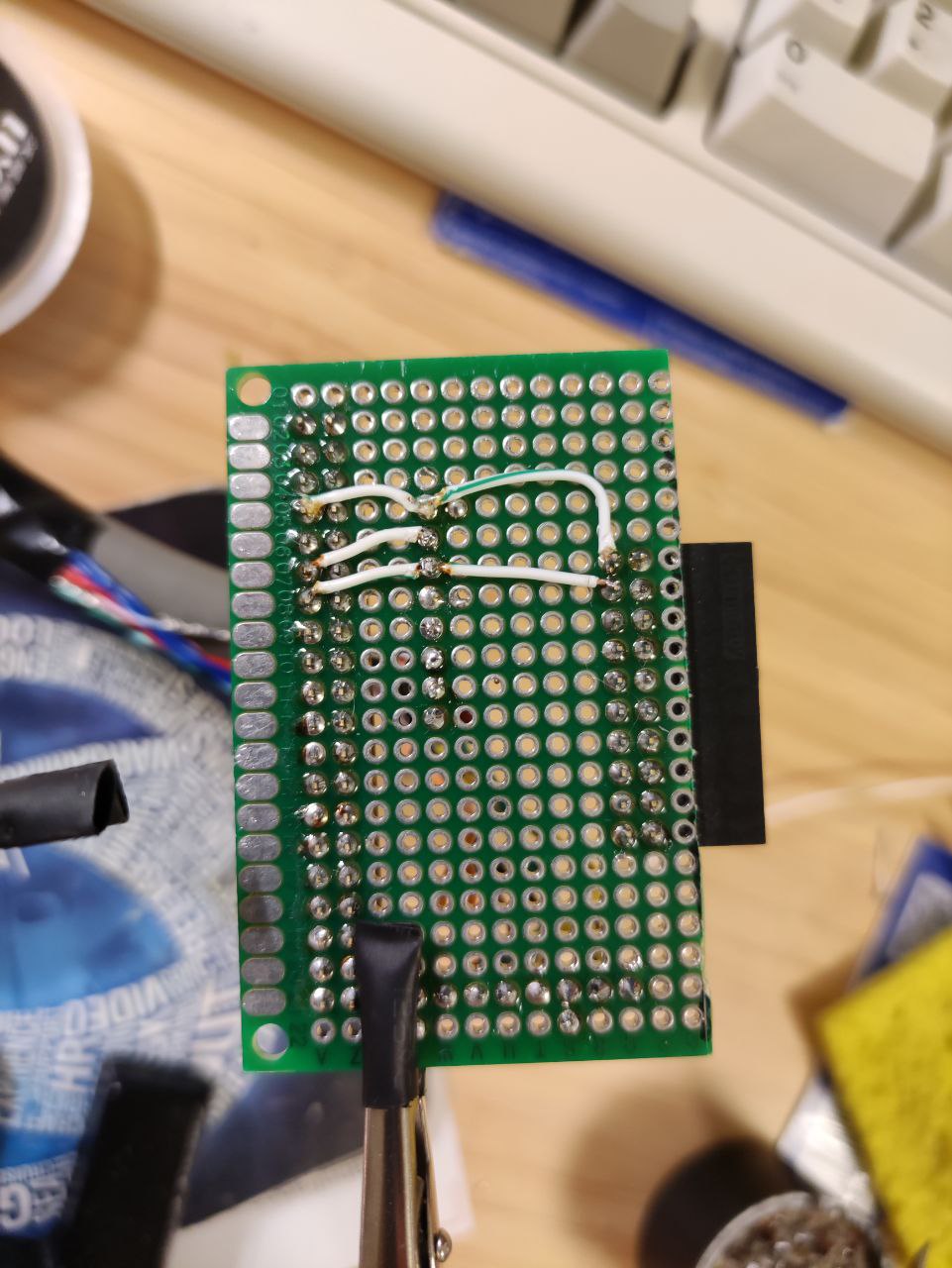
Да уж... Сложновато паять этот cat5
Но вроде понял как с ним работать
Но вроде понял как с ним работать
Y
22:01
YL3AKC
In reply to this message
Ну. Не плохо выглядит.
Когда дойдешь до Джена. Сможешь одним проводом спаять. По середине подплавил изоляцию и не надо будет в два провода.
Когда дойдешь до Джена. Сможешь одним проводом спаять. По середине подплавил изоляцию и не надо будет в два провода.
22:01
К стати хорошо замоддил Батарейки.
22:04
По ЧПУ и двухсторонней плате: Я, конечно скуну файлы, но там есть некоторые неприятные нюансы с двухсоторннеы пайкой. Попробую с начало оптимизировать чтоб было меньше больи.
Суть пвоблемы: а как припаятся если дорожка идет пот конектором. Туда паяльником не подлезть... Так что... Думаю...
Суть пвоблемы: а как припаятся если дорожка идет пот конектором. Туда паяльником не подлезть... Так что... Думаю...
KL
22:18
Kirill Leyfer
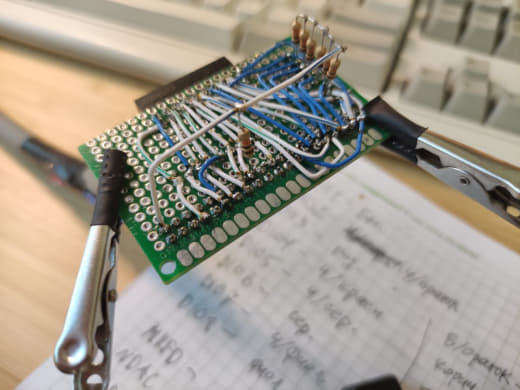
Пока ещё дзен не познал, паяю отдельными отрезками
Y
22:21
YL3AKC
In reply to this message
А нука зумчиком посмотрим на пайку...
Не плохо. Совсем не плохо! Со временем и найдешь метод автоматизаций/конжейеризаци изготовления, нарезки/чистки проводов и пойдет еще быстрей.
Не плохо. Совсем не плохо! Со временем и найдешь метод автоматизаций/конжейеризаци изготовления, нарезки/чистки проводов и пойдет еще быстрей.
ВЗ
22:39
Владислав Задорожкин

Тем временем моя пайка...
Y
22:44
YL3AKC
In reply to this message
Тоже не плохо! Молодец!
Вот тебе на подарок видеоролик как дядьки отреставрировали калькулятор. Суть ролика: пайка примерно как у тебя.
https://www.youtube.com/watch?v=C-o6aznNuGo
Вот тебе на подарок видеоролик как дядьки отреставрировали калькулятор. Суть ролика: пайка примерно как у тебя.
https://www.youtube.com/watch?v=C-o6aznNuGo
KL
22:46
Kirill Leyfer
In reply to this message

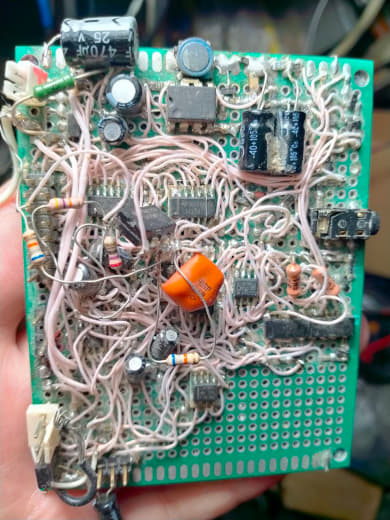
Очень медленно идёт и начал ошибаться. Наверное ещё пара проводов и пора баиньки, завтра закончу
Y
22:48
YL3AKC
In reply to this message
Эхх. Надо-бы глянуть дифф. Появляется идеи как интегрировать мои куски кода. Даже с помощю зубной больи и без рефакторинга.
Ну и есть идеи кода по тестам линий для ослика.
Ну и есть идеи кода по тестам линий для ослика.
22:50
In reply to this message
Страдай! Это норма для электронщиков. Да, относительно много проводов. А потом всё проверить на правильность и прозвонить на короткие замыкания...
KL
23:52
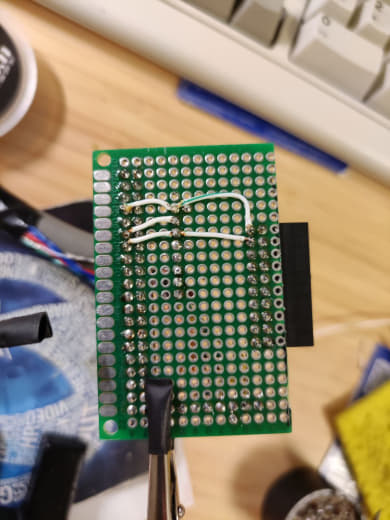
Kirill Leyfer
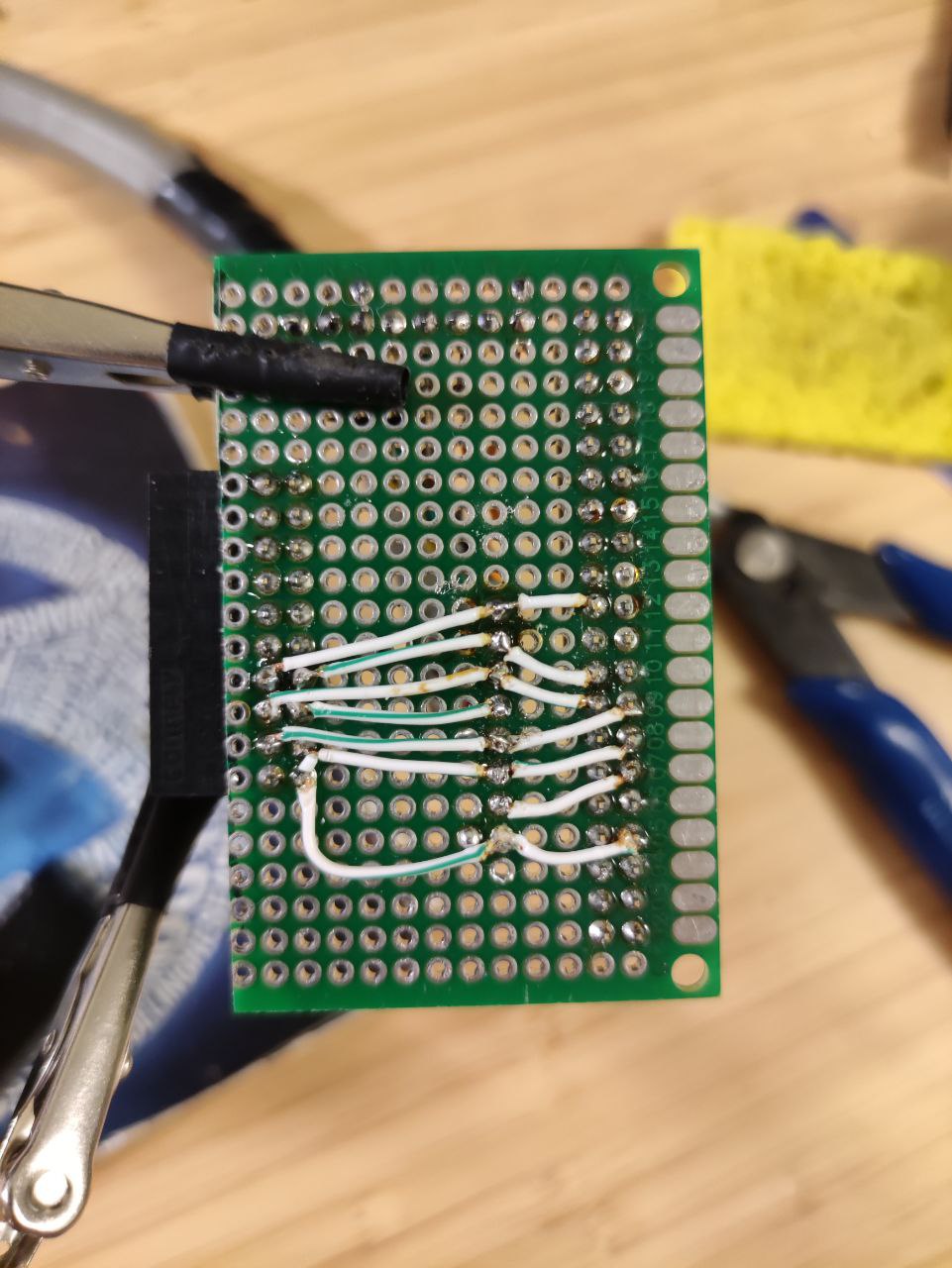
Успел сделать линии данных (синие)
На сегодня хватит, завтра продолжу
На сегодня хватит, завтра продолжу
Y
23:56
YL3AKC
In reply to this message
Будет и 2. слой (красные).
Посмотрел, подумал. Не оптимально развел. Будет немного сложно местами. Особенно там, где надо будет припаять провод между существующими возле малинки.
И да, в процессе рисовки платы для ЧПУ.
Посмотрел, подумал. Не оптимально развел. Будет немного сложно местами. Особенно там, где надо будет припаять провод между существующими возле малинки.
И да, в процессе рисовки платы для ЧПУ.
KL
23:58
Kirill Leyfer
In reply to this message
Подумаю как решить
Возможно, кину перемычку до соседней дырки бредборда, и уже оттуда запаяю, если иначе никак будет
Возможно, кину перемычку до соседней дырки бредборда, и уже оттуда запаяю, если иначе никак будет
Y
12 June 2023
KL
00:00
Kirill Leyfer
In reply to this message
Ну или так, да, мне не привыкать, пару раз перепаивал уже некоторые провода
Y
Y
01:57
YL3AKC
Как то так...
Пока лень экспортировать.
Пока лень экспортировать.
01:57
01:57
01:59
@Megabozyakorovka Дай контакт того чувака, который может сделать платку, или пригласи в группу. Договоримся о формате, который ему удобен для изготовления и подправлю технологические нюансы относительно изготовления платы на ЧПУ.
02:00
@usernameak А ты что не спишь?
ВЗ
u
ВЗ
u
02:35
usernameak
.webp)
KL
10:23
Kirill Leyfer
In reply to this message
Круто, спасибо огромное!
Я его спросил - он говорит, двусторонние платы ему очень замороченно изготавливать, поэтому если удастся сделать одностороннюю, то будет супер
Я так понимаю, одностороннюю сделать нереально, там провода пересекаются
Но наверное как компромисс можно сделать одностороннюю + пару перемычек напаять руками
Но пока, в общем, ничего не делай, я попробую на макетке всё развести
Я его спросил - он говорит, двусторонние платы ему очень замороченно изготавливать, поэтому если удастся сделать одностороннюю, то будет супер
Я так понимаю, одностороннюю сделать нереально, там провода пересекаются
Но наверное как компромисс можно сделать одностороннюю + пару перемычек напаять руками
Но пока, в общем, ничего не делай, я попробую на макетке всё развести
Y
12:57
YL3AKC
In reply to this message
Да, можно думать с перемичками, но есть и другой, кардинальный способ: поменять нумерацию линий на малинке и на анализаторе.
12:59
Но, давай закончим начатое, и потом будем думать о плате. Возможно до того времени уже надумаемся до платы с микросхемами SN75160+SN75161/162
13:00
Возможно имеет смысл на алиэкспресс заказать соответствующее микросхемы. Пока они придет, будет ясно что и как дальше делать.
13 June 2023
Y
KL
15:47
Kirill Leyfer
In reply to this message
Пока не брался, на неделе сделаю
Чёт разболелся окончательно
Чёт разболелся окончательно
Y
15:52
А я тем временем думаю о Production version.
Raspberry Pi Pico RP2040 + SD Card + Display + SN75 drivers + GPiB connector.
Raspberry Pi Pico RP2040 + SD Card + Display + SN75 drivers + GPiB connector.
ВЗ
18:31
Владислав Задорожкин
In reply to this message

У меня тут зато кое-чего есть
Собрал универсальный MBUS/FBUS кабель для нокл. Спаял конечно кое-как, но оно работает вроде.
Собрал универсальный MBUS/FBUS кабель для нокл. Спаял конечно кое-как, но оно работает вроде.
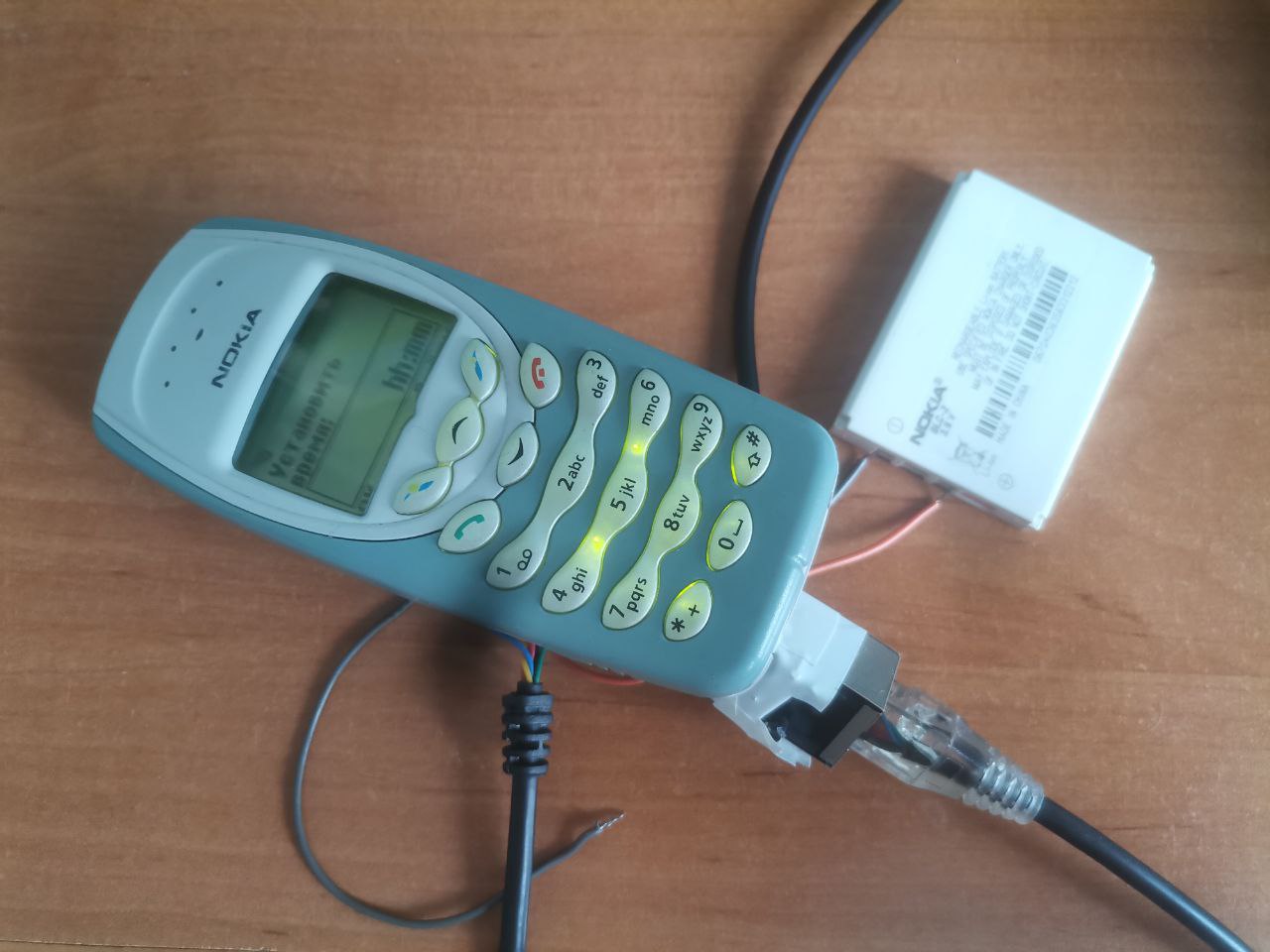
18:33

Для программатора пока еще жду микросхему. Пока думаю, как бы ее тут разместить, больно корпус маленький (а микруха в DIP версии, чтобы паять проще).
Да, ишачу навесом, че уж
Да, ишачу навесом, че уж
u
18:34
usernameak
In reply to this message
если достаточно смелый, можно вфигачить полноценный TMS9914 :)
Y
19:36
YL3AKC
In reply to this message
Зачем туда TMS9914?
TMS9914 удожен если захочется сделать свою GPiB ISA карту. Да и то, в наши дни проще поставить микроконтроллер на ISA плату, и с него помощю эмулировать GPiB.
TMS9914 удожен если захочется сделать свою GPiB ISA карту. Да и то, в наши дни проще поставить микроконтроллер на ISA плату, и с него помощю эмулировать GPiB.
KL
20:51
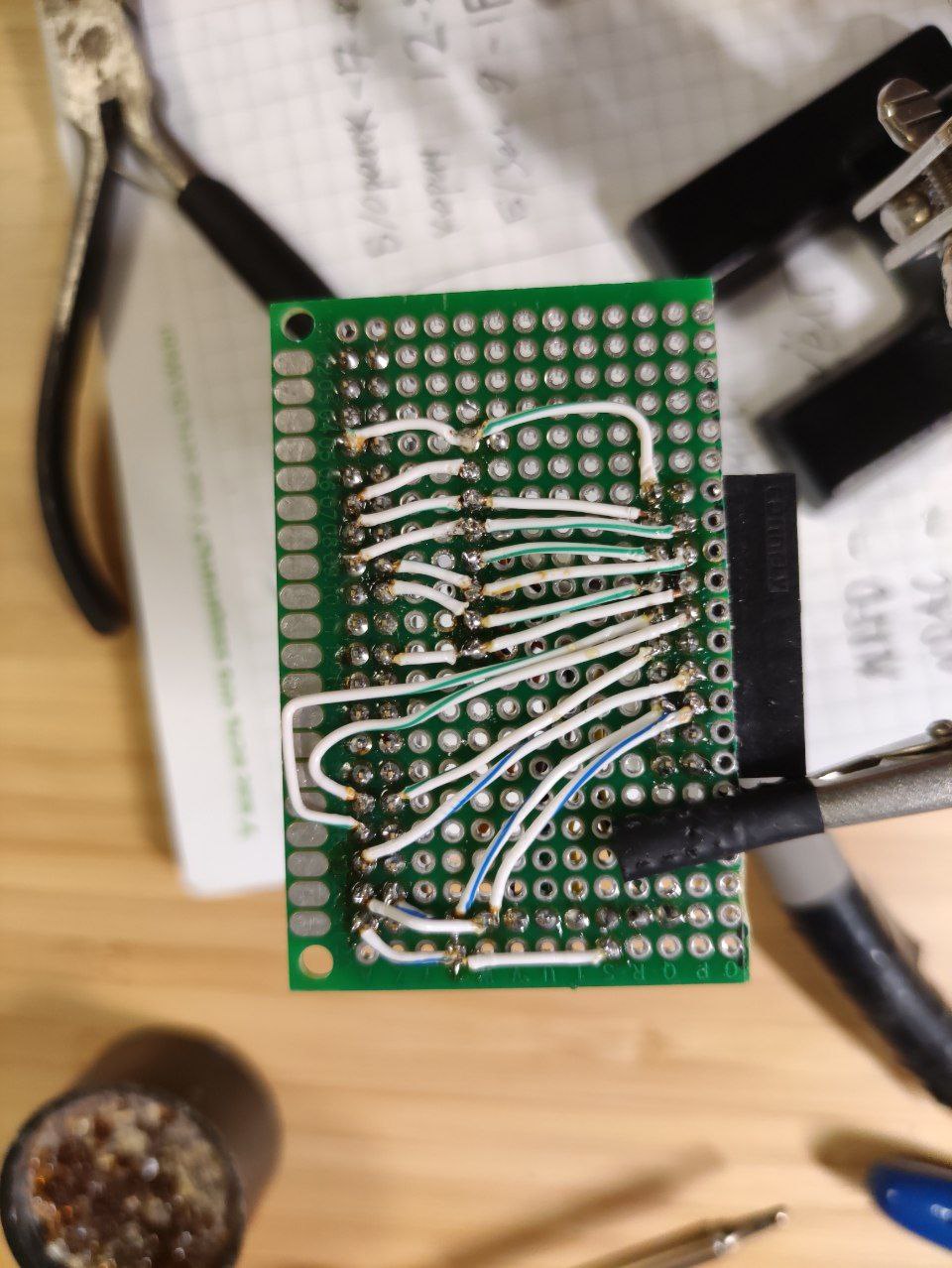
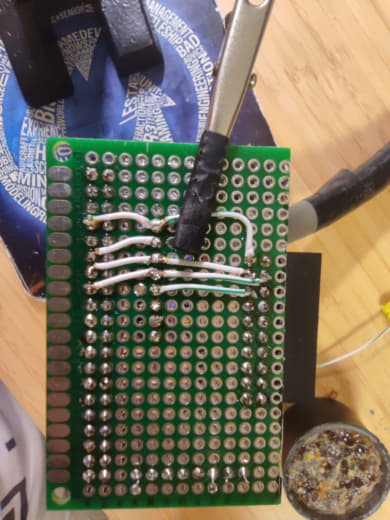
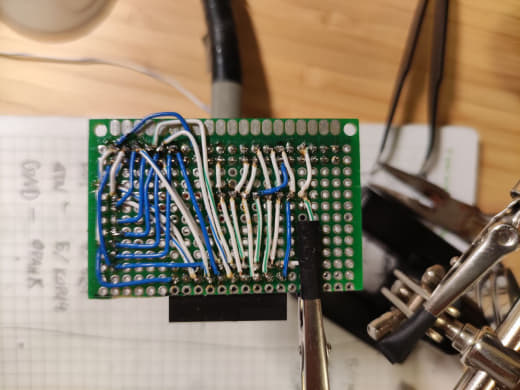
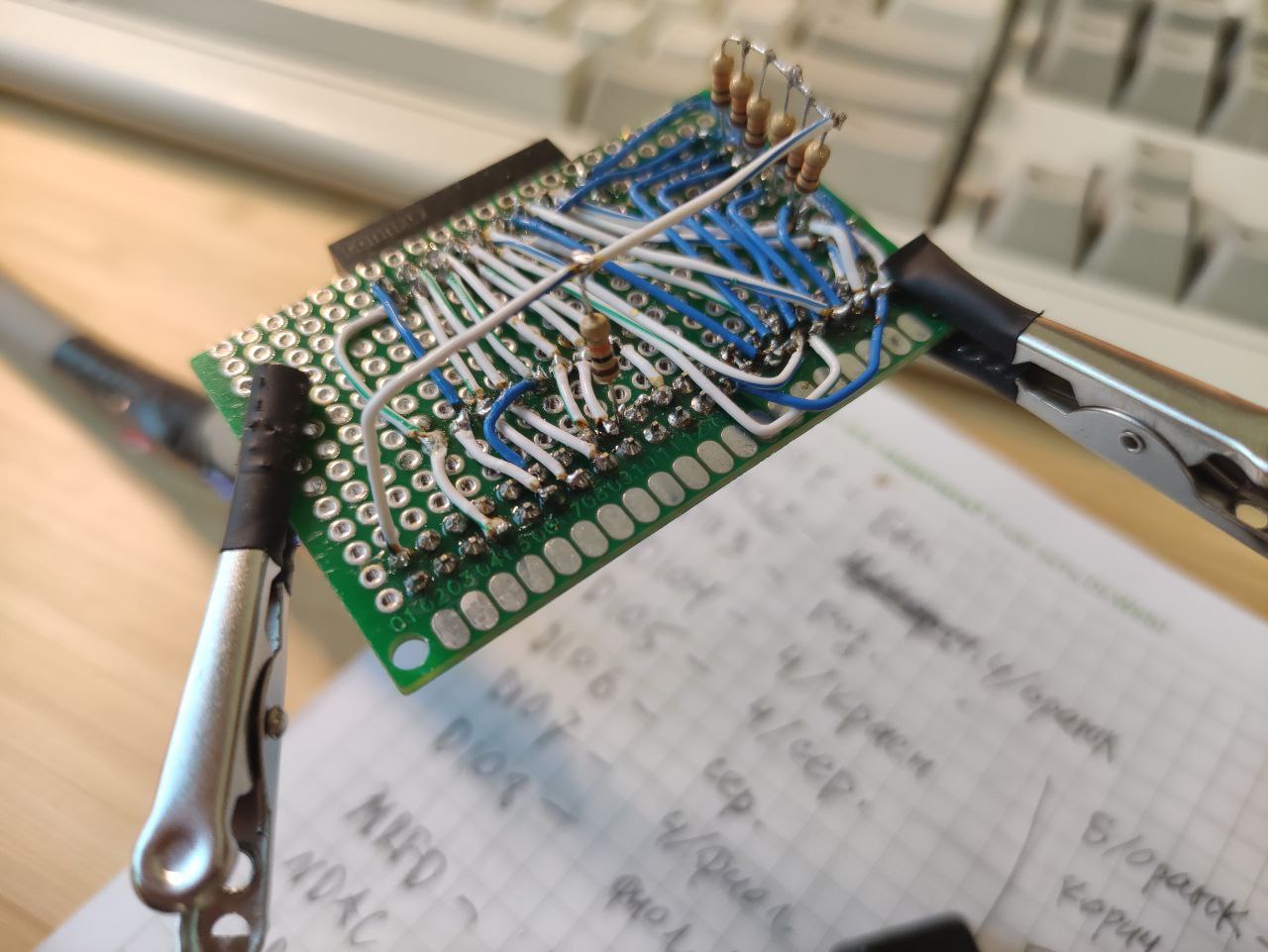
Вроде закончил первый слой
20:52
Осталось проверить перед началом второго
Y
20:55
YL3AKC
В полне себе нормально.
20:56
12 проводов осталось.
Y

KL
21:35
там щас такое reality будет
21:35
шо пипец
Y
.webp)
u
KL
Y
u
21:51
usernameak
In reply to this message
нормальный паяльник с слегка подзасранным жалом считается?
Y
21:52
YL3AKC
Я, конечно мог и предложить разноцветный шлейф из медицинского оборудование, который мягкий и уже облуженный, но вряд-ли у вас такой имеется...
21:53
In reply to this message
Если это TS100, То да. Время от времени обтери в салфетку.
Я, конечно обтираю голыми пальцами, но...
Я, конечно обтираю голыми пальцами, но...
u
21:55
у него жало весьма потемнело выше кончика по неведомой мне причине
21:55
(или это нормально?)
Y
21:56
YL3AKC
Это нормально.
u
21:57
usernameak
у меня ещё в загашнике есть тонкое жало-игла, порой пригождалось в местах куда хер подлезешь)
Y
KL
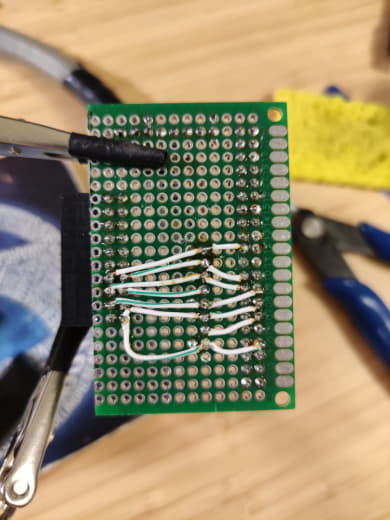
22:34
Kirill Leyfer
Ебануться
Извините
Извините
22:35
Вот это развлечение мы с вами придумали, чуваки
22:35
Так, надо прозвонить, я очень надеюсь, что не ошибся
Y
22:39
YL3AKC
И я надеюсь, что не перепутал контакты...
KL
22:44
Kirill Leyfer
вроде всё сходится
22:44
и даже не коротит, кажется
Y
22:44
YL3AKC
Запускай ГРиД!
KL
22:44
Kirill Leyfer
сейчас ещё раз проверю
22:47
вроде не коротит
окей, ща сделаем
окей, ща сделаем
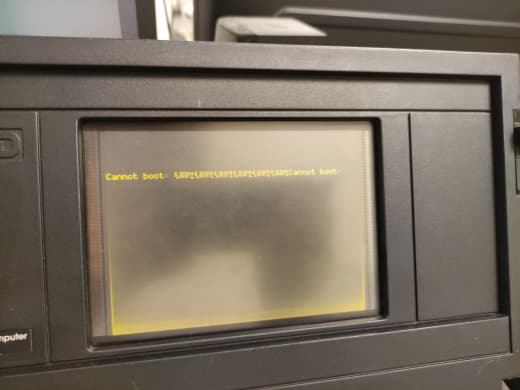
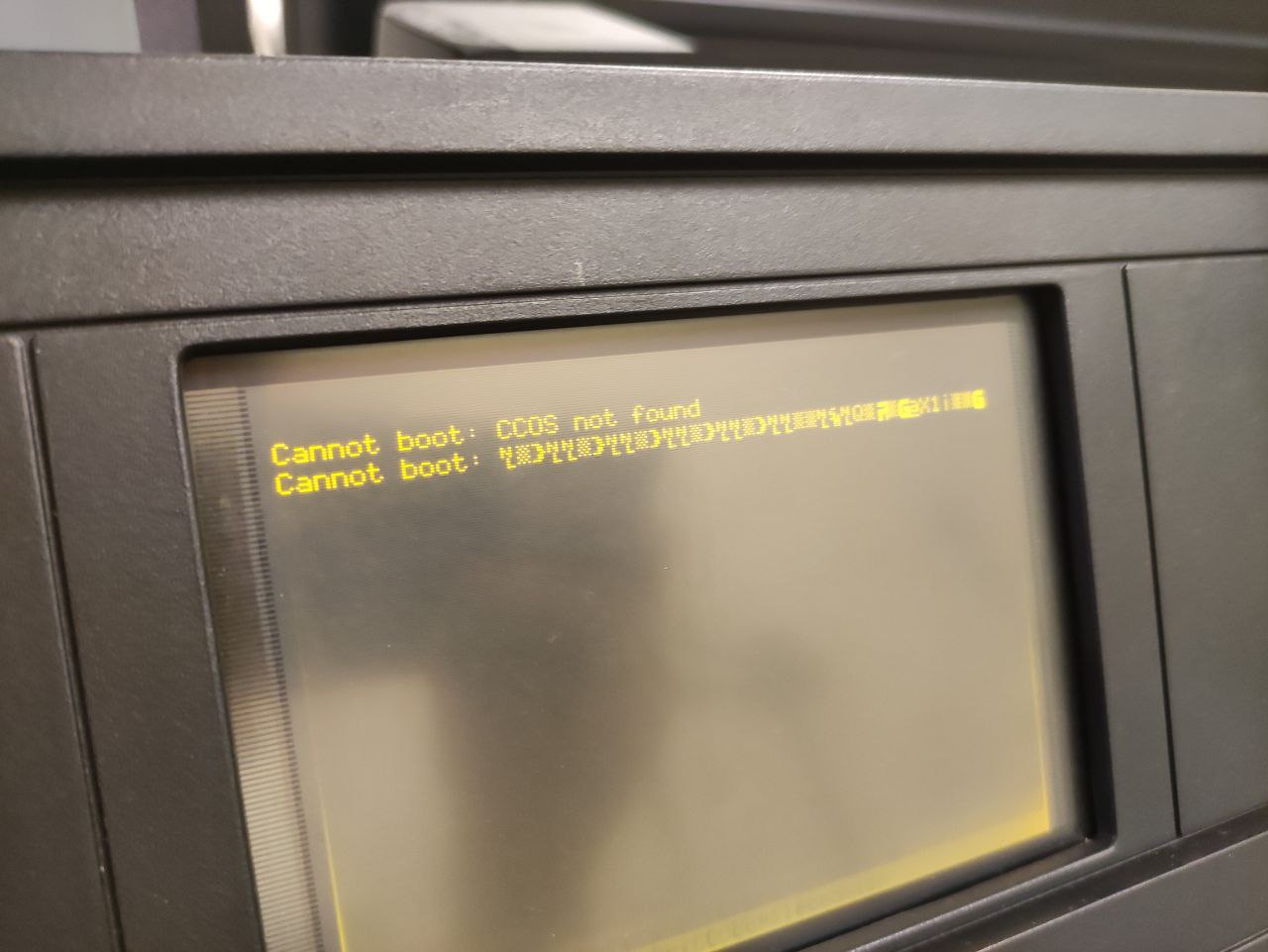
22:57
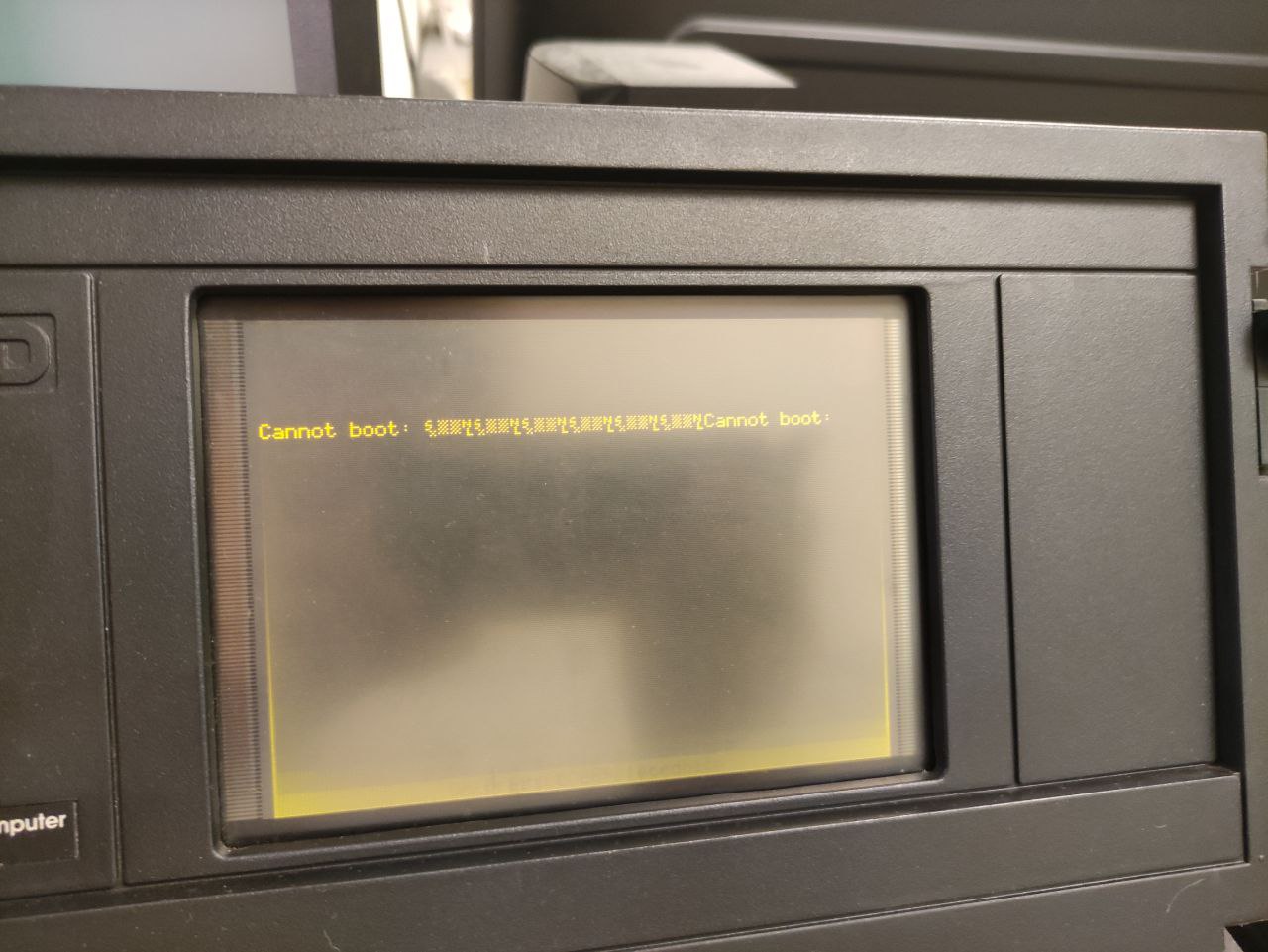
Ну пока что результат такой же
22:57
Максимум пять секторов принял
22:58
Сейчас пропущу через скрипт по поиску аномалий
22:58
Только наберу статистики
Y
22:58
YL3AKC
И кинь результат в чат.
22:58
Ну а дальше... Эксперименты с софтом.
22:59
KL
22:59
Kirill Leyfer
Y
23:00
YL3AKC
Читает но с ошибками...
23:00
Можно попробовать поправить управление пинами.
23:00
Сща... Смотрю твой последний код.
KL
23:02
Kirill Leyfer

Y
23:02
YL3AKC
Твоё:
#define GPIB_WRITE_FUNCTION_DEFINE(pinName) \
void GPIB_Write_##pinName(int value) { \
LOG("Write " #pinName" %d\n", value); \
GPIB_Pin gpibPin = GPIB_PIN_##pinName; \
/*if (GPIB_pin_states[gpibPin] == value) return;*/ \
uint8_t pin = remapGPIBPin(gpibPin); \
if (value) { \
GPIO_IF_SetMode(pin, GPIO_IF_INPUT); \
} else { \
GPIO_IF_SetMode(pin, GPIO_IF_OUTPUT); \
GPIO_IF_SetPinState(pin, value); \
} \
/*GPIB_pin_states[gpibPin] = value;*/ \
}
ВЗ

KL
23:05
Kirill Leyfer
Ну, в общем, где-то в среднем секторов по 5-7 пересылает
ВЗ
Y
23:06
YL3AKC
Рекомендую так:
#define GPIB_WRITE_FUNCTION_DEFINE(pinName) \
void GPIB_Write_##pinName(int value) { \
LOG("Write " #pinName" %d\n", value); \
GPIB_Pin gpibPin = GPIB_PIN_##pinName; \
/*if (GPIB_pin_states[gpibPin] == value) return;*/ \
uint8_t pin = remapGPIBPin(gpibPin); \
if (value) { \
GPIO_IF_SetPullup(pin); \
GPIO_IF_SetMode(pin, GPIO_IF_INPUT); \
} else { \
GPIO_IF_SetPinState(pin, value); \
GPIO_IF_SetMode(pin, GPIO_IF_OUTPUT); \
} \
/*GPIB_pin_states[gpibPin] = value;*/ \
}
ВЗ
23:07
Владислав Задорожкин
а я накакуне открытия FTP менял формат индексных файлов
стало быть по занятости тебя не предупредил...
стало быть по занятости тебя не предупредил...
Y
23:07
YL3AKC
In reply to this message
Суть в том чтоб выставить нужный уровень, а только потом направление (вход/выход)
ВЗ
23:07
Владислав Задорожкин
счас вернем как надо
Y
23:08
YL3AKC
И надо еще пройти по коду. А друг там еще ге нибудь есть строка с дервианеиме пинов.
23:09
У тебя:
int GPIB_Read_DIO() {
int byteValue = 0;
for(int i = 0; i < 8; i++) {
GPIB_Pin gpibPin = (GPIB_Pin) (GPIB_PIN_DIO1 + i);
uint8_t pin = remapGPIBPin(gpibPin);
GPIO_IF_SetMode(pin, GPIO_IF_INPUT);
GPIO_IF_SetPullDown(pin);
// GPIB_Pin gpibPin = (GPIB_Pin) (GPIB_PIN_DIO1 + i);
byteValue |= GPIO_IF_GetPinState(pin) << i;
}
return byteValue;
}
23:10
Советую:
int GPIB_Read_DIO() {
int byteValue = 0;
for(int i = 0; i < 8; i++) {
GPIB_Pin gpibPin = (GPIB_Pin) (GPIB_PIN_DIO1 + i);
uint8_t pin = remapGPIBPin(gpibPin);
GPIO_IF_SetPullup(pin);
GPIO_IF_SetMode(pin, GPIO_IF_INPUT);
// GPIB_Pin gpibPin = (GPIB_Pin) (GPIB_PIN_DIO1 + i);
byteValue |= GPIO_IF_GetPinState(pin) << i;
}
return byteValue;
}
KL
23:14
Kirill Leyfer
нет, лучше не стало
12845 ошибок на этих сессиях
8856 ошибок на сессиях от 27 мая (там на 1 сессию меньше)
12845 ошибок на этих сессиях
8856 ошибок на сессиях от 27 мая (там на 1 сессию меньше)
23:14
короче, результат нулевой или даже скорее отрицательный
Y
23:14
YL3AKC
In function G210x_NDAC_Callback(int state)
after GPIB_Write_DIO(0xFF);
add line GPIB_Read_DIO();
after GPIB_Write_DIO(0xFF);
add line GPIB_Read_DIO();
KL
Y
23:16
YL3AKC
Ты в некоторых местах не коректо пиступаешь с линиями.
Мовно либо ослабить (лог 1) с помовю pullup
либо прижать на земпля (лог 1). с помошю output low
Мовно либо ослабить (лог 1) с помовю pullup
либо прижать на земпля (лог 1). с помошю output low
KL
Y
23:17
YL3AKC
In reply to this message
Ну... Надо оба варианта попрововать и посмотреть на анализаторе/ослике.
Как бы луче заменить, но... Тесты покажет.
Как бы луче заменить, но... Тесты покажет.
KL
23:19
Kirill Leyfer
хорошо, начну с добавления
Y
23:21
YL3AKC
По этому и я написал _passive _active функций.
KL
23:21
Kirill Leyfer
отличий не заметил
23:23
добавлю ещё в GPIB_WRITE_FUNCTION_DEFINE
if (value) { \ GPIO_IF_SetPullup(pin); \
if (value) { \ GPIO_IF_SetPullup(pin); \
Y
23:25
YL3AKC
И да. Надо только _pullup
_pulldown не где не используется и морочит голову.
_pulldown не где не используется и морочит голову.
KL
23:25
Kirill Leyfer
эффекта не дало
Y
23:27
YL3AKC
In reply to this message
В этом поменять местами GPIO_
поставил режим пина а потом пуллап и/или валуе
поставил режим пина а потом пуллап и/или валуе
KL
23:28
короче сигнал скачет как собака, надо думать чё делать
23:28
так, а если я таки запаяю оплётку на землю?
23:29
но уже не сегодня
23:30
завтра продолжим эксперименты
Y
23:30
YL3AKC
Осликом можно и что-то не увидеть. Надо будет написать тестовую программу, которая на шине дергает DIO8.
KL
Y
23:34
YL3AKC
Просто всё в дисплей не в лезет.
23:35
Тебе надо в нжный момент посмотреть спад сигнала
23:35
А между изменение сигнала проходит много времени.
23:36
По этому надо будет не AUTO/RUN а Single режим использовать. А это сложнее чем учили в школе.
23:37
Ладно, всем спать!
KL
23:46
Kirill Leyfer
In reply to this message
Да, ещё раз спрошу - если оплетку на землю запаять - будет эффект?
Y
23:46
YL3AKC
Попробуй
23:47
Поможет? Хз. Не понятно почему там дергивание сигнала.
23:47
А если китайский логический анализатор иногда ложет в своих показаниях?
23:48
Ведь аномалий есть и на дампе с реальным флопиком.
23:49
И да, время припаять резисторы.
KL
Y
23:49
YL3AKC
Один конец резистора к линий. Второй конец на +5 В на малинке
23:50
И так все 16 линий.
KL
Y
23:52
YL3AKC
In reply to this message
Все резисторы красиво в верх смотрят, и к ним проводочек на +5 В
KL
Y
23:53
YL3AKC
На плате не смогу нарисовать.
23:53
Софт рисованию плат не понимает такой колхоз...
KL
23:53
Kirill Leyfer
Надо было с них начинать пайку
В дырки их повтыкать и к ним уже паяться
В дырки их повтыкать и к ним уже паяться
Y
23:54
YL3AKC
In reply to this message
Хз. Может быть и так. Но количество провдов могло увеличится на 16 штук. Если нет место рядом поставить резик.
14 June 2023
YL3AKC invited Alexey Svetlov
YL3AKC invited reva
Y
08:23
YL3AKC
Относительно софтовой части... Тут один студент трудился над курсовой... Сделал на малинке ГПиБ контроллер. Можно управление пинами у него посмотреть.
08:26
И да... Надо подумать над принужденными задержками после деривания пинов.
KL
08:29
Kirill Leyfer
In reply to this message
Предлагаю следующий алгоритм
Чтоб не паять кучу всего, я пройдусь по сессиям, гляну на какой линии чаще аномалии.
Потом возьму и конкретно на эту линию запаяю пуллап резюк
И сравню
Чтоб не паять кучу всего, я пройдусь по сессиям, гляну на какой линии чаще аномалии.
Потом возьму и конкретно на эту линию запаяю пуллап резюк
И сравню
Y
08:30
YL3AKC
И у него там драйвер ядра. Вроде.
08:31
И да, если надо большой скоростю дергать пины, то рекомендуется чтоб был Ring 0.
u
08:32
usernameak
In reply to this message
я не особо понимаю что здесь написано, потому что оно на немецком, но ладно
Y
08:32
YL3AKC
Но, с другой стороны GPiB как раз делан так, чтоб и медленные устройства могли работать. И обесчал быть помехоустойчивым.
u
Y
08:34
In reply to this message
Мне тоже так кажетсю. Пи этом миросхемы - драйвера может тянуть линий с током 50 мА, а малинка от силы 4 или 10 мА.
KL
14:27
Kirill Leyfer
Сегодня ещё раз проглядел данные
всё-таки если сделать поправку на объёмы переданных данных, то спаянная макетка работает стабильнее бредбордной
всё-таки если сделать поправку на объёмы переданных данных, то спаянная макетка работает стабильнее бредбордной
14:28
13к скачков на 400к семплов против 9к скачков на 108к семплов
Разница таки есть
Разница таки есть
14:28

но до стабильности реального флопика далеко
250 скачков на 1.5млн семплов
250 скачков на 1.5млн семплов
r
16:00
reva
привет. вот тут делали подобное, как я понимаю: http://elektronomikon.org/. и приведены два варианта схемы: активная на буферных элементах, и пассивная на резисторах.
https://github.com/elektronomikon/raspi_gpib_shield/raw/master/Documentation/RPi_GPIB_Shield.pdf
https://github.com/elektronomikon/raspizero_gpib_shield/raw/master/Documentation/RaspiZero_GPIB_Schematic.pdf
возможно стоит попробовать добавить резисторные подтяжки указанных номиналов хотя бы на одну-несколько линий (с открытым коллектором) вместо внутренней подтяжки (я так понимаю, сейчас ведь используется внутренняя подтяжка иначе как вообще сейчас появляется какой-либо сигнал на линии?), чтобы посмотреть улучшит ли это ситуацию на них.
https://github.com/elektronomikon/raspi_gpib_shield/raw/master/Documentation/RPi_GPIB_Shield.pdf
https://github.com/elektronomikon/raspizero_gpib_shield/raw/master/Documentation/RaspiZero_GPIB_Schematic.pdf
возможно стоит попробовать добавить резисторные подтяжки указанных номиналов хотя бы на одну-несколько линий (с открытым коллектором) вместо внутренней подтяжки (я так понимаю, сейчас ведь используется внутренняя подтяжка иначе как вообще сейчас появляется какой-либо сигнал на линии?), чтобы посмотреть улучшит ли это ситуацию на них.
ВЗ


16:12
Навесом все зафигачить
Y
16:26
YL3AKC
In reply to this message
Déjà vu... Где то я это уже видел. Это то самый с курсовой работой...
https://t.me/gridcompasschat/3529
https://t.me/gridcompasschat/3529
Y
KL
Y
17:14
YL3AKC
In reply to this message
Значит 3 раза больше резисторов надо будет напаять. Ну и... По сути новая плата с проводами... К сожелению...
17:26
С начало попробуй по простому с 10к резисторами, как раньше договорились.
KL
ВЗ
18:13
Владислав Задорожкин
In reply to this message
И не работает чет
дает ошибку про высокий уровень на tx телефона
дает ошибку про высокий уровень на tx телефона
Y
ВЗ
18:25
Владислав Задорожкин
Надо будет позже проверить
18:25
Сама схема вроде собрана верно
18:26
Но тут дофига нюансов
KL
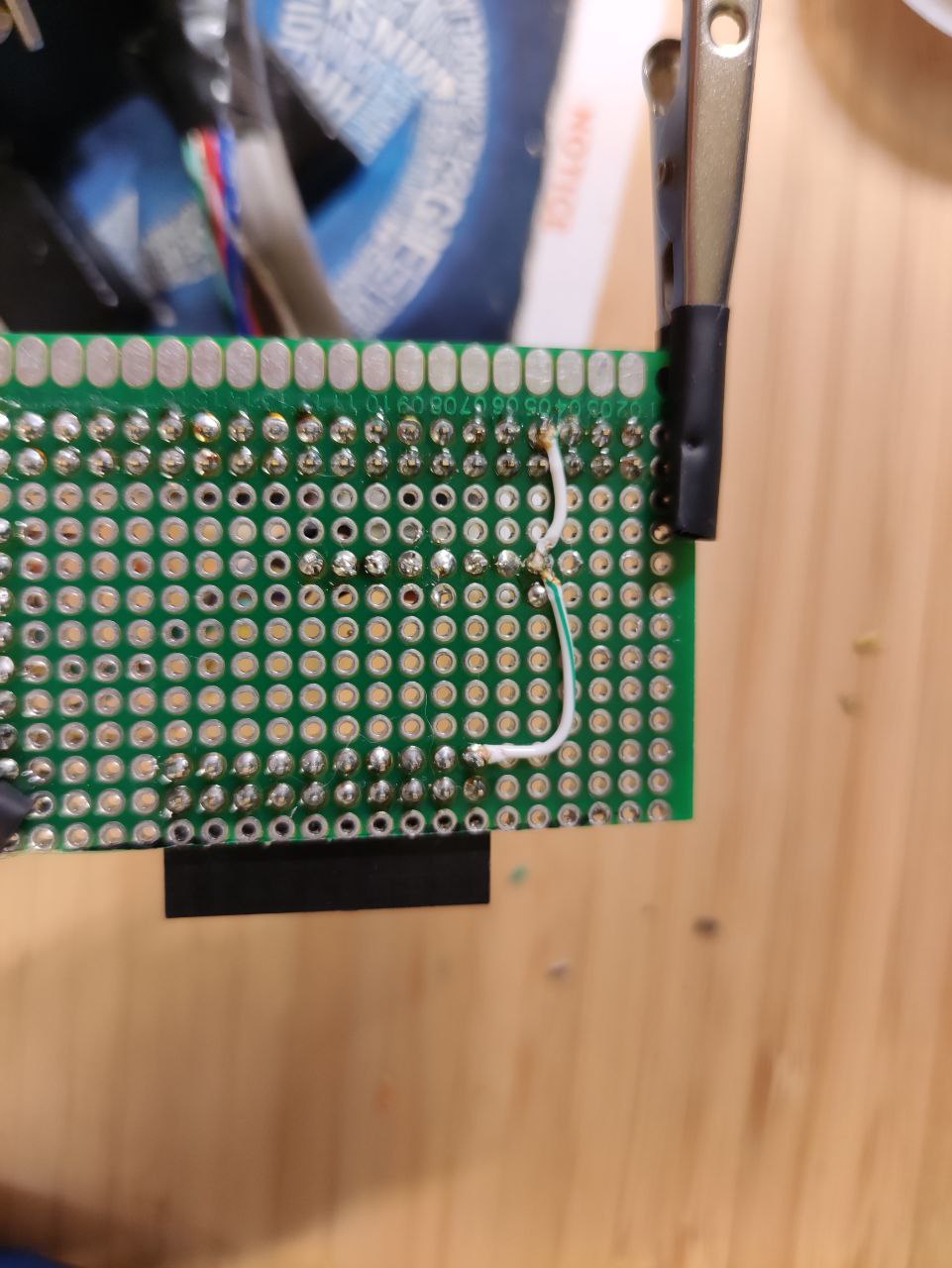
19:32
Kirill Leyfer
короче делаю простой pullup резюками 10кОм на линию 5в для сигналов DAV, NDAC, NRFD - вроде как для самых важных в коммуникации
Y
19:38
YL3AKC
ATN SRQ EOI
19:38
DIO8 для тестов.
KL
19:40
Kirill Leyfer
ок
19:40
подожди
19:40
это "вместо" или "вместе"?
19:40
того, что я предложил
Y
19:41
И на DIO8
19:42
Общее количество: 7 резисторов.
KL
19:42
Kirill Leyfer
там сложно подпаяться уже) с моим скиллом
19:42
ладно, попробую
19:54
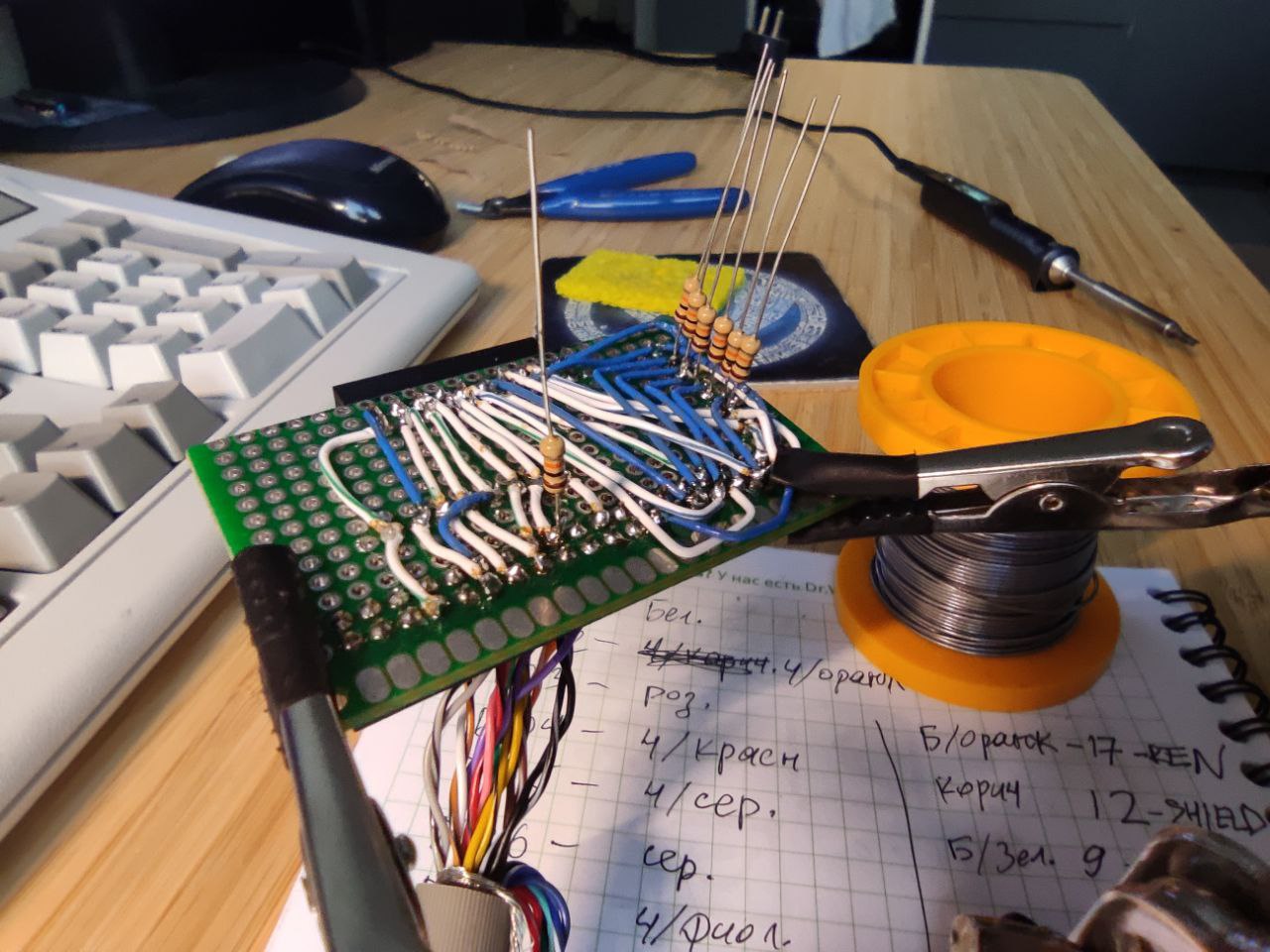
Вы заставляете меня делать страшные вещи
19:54
Я всего лишь хотел писать код
19:54
И к чему это привело?
Y
19:55
YL3AKC
Ты сам виноват что у тебя есть ГРиД! 😃
u
Y
19:56
YL3AKC
Но, так-то... Резики прямо по плану!
20:01
@Megabozyakorovka Если это тебя успокоит. Я тоже страдаю. И половины еще не нарисовал...
20:01
Да пофигу. Главное знать что DIO7 и смотреть на анализаторе.
KL
20:11
Kirill Leyfer
Что я делаю со своей жизнью
u
KL
ВЗ
20:11
Владислав Задорожкин
In reply to this message
а я хотел нормально шить нокии
теперь вот не понимаю, почему не работает флешер(
теперь вот не понимаю, почему не работает флешер(
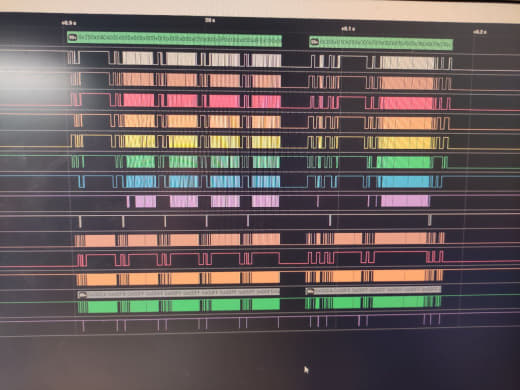
KL
20:22
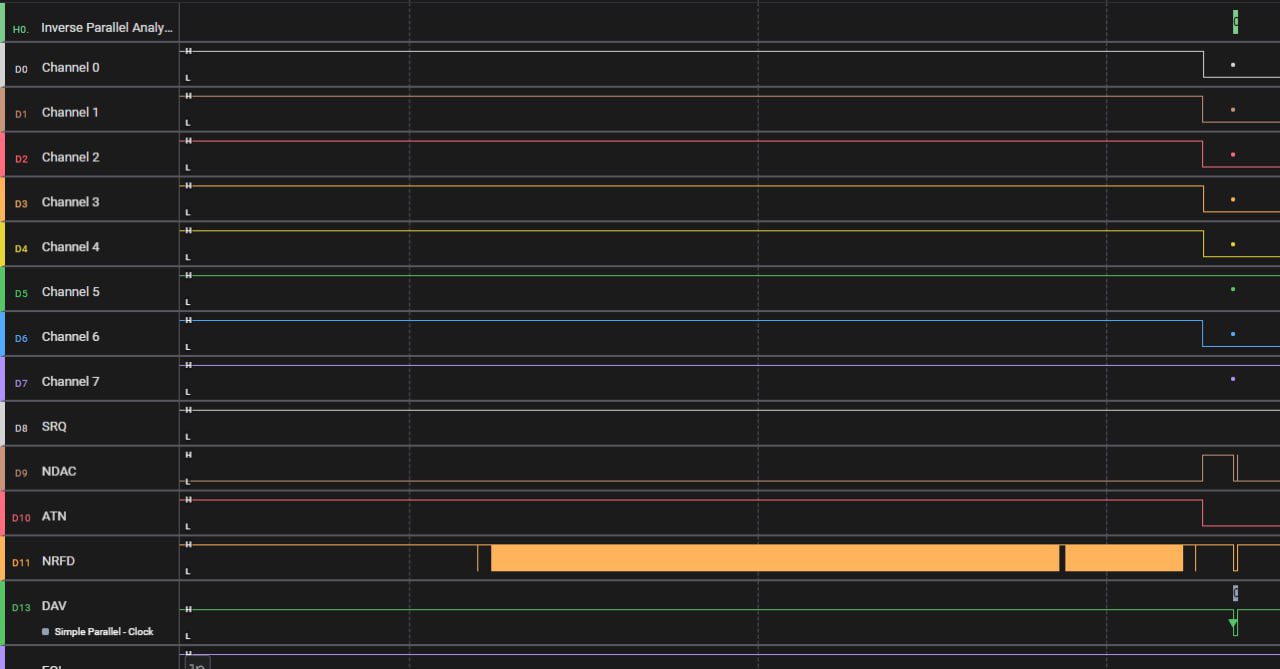
Kirill Leyfer
не грузится
и с NRFD что-то странное, словно пиха не может его опустить нормально
или грид
не понимаю
и с NRFD что-то странное, словно пиха не может его опустить нормально
или грид
не понимаю
20:22
т.е сейчас в логах дело доходит только до первой команды и дальше не идёт
u
20:23
usernameak
учитывая что ты потрошил железо, проблема... в железе?
KL
20:24
Kirill Leyfer
наверное, сейчас перепроверю плату
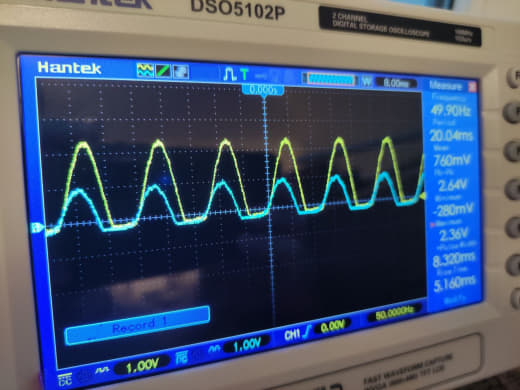
20:26
иногда нормально, а иногда вот как будто нет
20:26
причём промежутки времени одинаковые, и продолжительность одинаковая
20:26
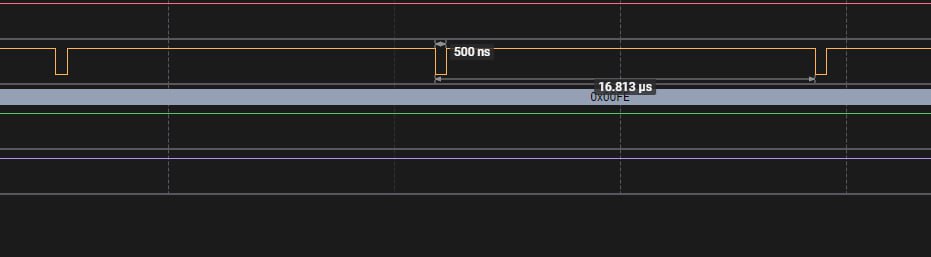
ровно 500 наносекунд каждые 16 микросекунд
20:27
т.е не частота дискретизации лог анализатора точно
20:31
с пайкой всё ок
20:34
в одной сессии вообще вот так было
20:34

то же самое
20:36
короче говоря я предлагаю откатить подтяжку резюками обратно и осциллографом потыкать
но если честно, я капец демотивирован этим проектом
но если честно, я капец демотивирован этим проектом
20:37
могу наверное конкретно подтяжку NRFD убрать
20:37
и оплётку на землю завести, хотя вряд ли это даст эффект
20:43
без подтяжки NRFD всё вернулось на свои места
20:44
несколько секторов грузит, потом вываливается с ошибкой
Y
20:44
YL3AKC
Соберись! Подключай ослик!
20:44
Каждое начало трудное. Потом пойдет!
20:46
Откатаешь подтяжку после ослика.
Y
21:42
In reply to this message
Странно, но ладно. Почему? Просто надо осликом потыкать когда там колбасит.
Y
22:21
YL3AKC
Z
Zerg Labs [TeslaCoilPro] 14.06.2023 22:12:22

Y
22:26
YL3AKC
@Megabozyakorovka
Оплетку к земпле присоедени
Если есть внешний Pull_up, То надо попробовать запустить код без внутеннего Pull_up
Оплетку к земпле присоедени
Если есть внешний Pull_up, То надо попробовать запустить код без внутеннего Pull_up
KL
Y
22:27
YL3AKC
Тут не запариватся надо а терпение и шаг за шахом избавлятся от неизветных переменных.
22:28
In reply to this message
Вот по этому и надо написать тестовый код, которы дергает один пин. И это надо смотреть анализатором и осликом.
При отключенном ГРиДе и при включенном ГРиДе.
При отключенном ГРиДе и при включенном ГРиДе.
22:29
Пин для тестов DIO7, Рас уж там нацепил резистор. Ну и пин DIO8, рас уж там нет резистора.
22:30
Когда будет понятно как правильней делать, тогда исправляем остальные пины, код управление пинами (если надо). И только тогда тестируем загрузку с эмуля флопа.
22:31
Накидать код для тестов пинов?
KL
22:33
Kirill Leyfer
постараюсь накидать самостоятельно, спасибо за подробный протокол тестирования, это очень полезно
я сегодня больше не буду гридом заниматься, завтра постараюсь найти время
я сегодня больше не буду гридом заниматься, завтра постараюсь найти время
Y
r
22:37
reva
@Megabozyakorovka попробуй по возможности поставить последовательно небольшие резисторы (ом по 100) как здесь https://github.com/elektronomikon/raspizero_gpib_shield/raw/master/Documentation/RaspiZero_GPIB_Schematic.pdf. хотя бы на одну линию. и можно без подтяжек
Y
22:37
YL3AKC
А тем временем я пострадал немного...
22:41
In reply to this message
Поздно и потом!
Он только что спаял одну плату. Пусть закончит тестировать и найдет причину, а потом видно будет куда и как много резисторов накидать.
Я по сути противник на прямую подключать малинку к ГПиБ и хочу чтоб было кошерно с соответствующими микрухами сделано.
И у того чела шилдик подключается к оборудованию на прямую без метрового кабеля.
Он только что спаял одну плату. Пусть закончит тестировать и найдет причину, а потом видно будет куда и как много резисторов накидать.
Я по сути противник на прямую подключать малинку к ГПиБ и хочу чтоб было кошерно с соответствующими микрухами сделано.
И у того чела шилдик подключается к оборудованию на прямую без метрового кабеля.
22:42
Ну или... С начало напаяет 3 резистора на одну линию данных и сравнит.
Перелапатить и перепаять кучу проводов - это действительно геммор, по этому не надо каждый день паять новую плату.
Перелапатить и перепаять кучу проводов - это действительно геммор, по этому не надо каждый день паять новую плату.
22:49
@Megabozyakorovka Пипробую сделать односторонную плату, но тогда придется менять номера пинов на малинке и на анализаторе.
22:57
Тут еще и надо следить чтоб Кирилл не выгорел. Ибо вся нагрузка на него, пока мы с дивана советы даем.
KL
23:47
Kirill Leyfer
In reply to this message
Спасибо! Да не, все нормально, я вроде слежу
Но да, я не шарю, поэтому полностью зависим от ваших советов)
Так что спасибо за четкий протокол тестирования выше, завтра постараюсь за него взяться
Но да, я не шарю, поэтому полностью зависим от ваших советов)
Так что спасибо за четкий протокол тестирования выше, завтра постараюсь за него взяться
Y
23:50
YL3AKC
In reply to this message
Ночю нарисую плату для ЧПУ с дополнительными резисторами и попробую написать тестер пинов.
Останется исправить мой ошибки и тестер готов к стриму. За кадром потренеруйся тестером и осликом. Ну и в суботу стрим.
Останется исправить мой ошибки и тестер готов к стриму. За кадром потренеруйся тестером и осликом. Ну и в суботу стрим.
15 June 2023
Y
00:37
YL3AKC
@Megabozyakorovka спроси у своего знакомого: А такое на ЧПУ прокатит? Надо только фрезернуть красные дорожки и все отверстия диаметром 0.9 мм
00:38
EagleCAD
00:38
00:38
KL
Y
ВЗ
00:48
Владислав Задорожкин
клуб не спящих ночью)
KL
00:48
Kirill Leyfer
In reply to this message
В эту планировал комод, а в следующую грид
Или с твоим графиком не совместимо такое? Сможешь в эту субботу быть на стриме? А в след?
Или с твоим графиком не совместимо такое? Сможешь в эту субботу быть на стриме? А в след?
Y
00:49
YL3AKC
Ха! У меня секретное оружие: мне завтра (уже сегодня) выходной.
KL
Y
00:50
YL3AKC
In reply to this message
По скольку у меня переезд в другую квартиру, то не могу сказать когда буду.
Вроде в эту субботу смогу присутствовать на стрим. А на следующею не знаю.
Вроде в эту субботу смогу присутствовать на стрим. А на следующею не знаю.
KL
00:51
Kirill Leyfer
Тогда давай в эту грид
Y
00:53
YL3AKC
ОК. Попробуем!
00:53
Пишу тест пинов.
Y
01:09
01:09
01:15
ВЗ
01:16
Владислав Задорожкин
у меня в пятницу экзамены
L
ВЗ
01:16
Владислав Задорожкин
завалить не желательно)
KL
Y
17:20
YL3AKC
@Megabozyakorovka Рабочий день закончился? Есть инфа от ЧПУшника? Не надо что-то подправить?
KL
17:24
Kirill Leyfer
из соседнего телевизионного чатика передают привет и говорят, что на макетке можно херачить и более упоротые дизайны
KL
17:24
Kirill Leyfer
A
Annett 15.06.2023 17:23:13
AS
17:24
17:24
17:24

KL
17:25
Kirill Leyfer
да, инфа есть, чувак сможет такое сделать - правда, попозже, пока занят
AS
Y
17:27
YL3AKC
In reply to this message
Да, можно. Знаю по собственному опыту.
НО, есть одно НО! Ты к этому пока морально не готов. 😃
НО, есть одно НО! Ты к этому пока морально не готов. 😃
KL
AS
17:30
Alexey Svetlov
In reply to this message
Вообще МГТФ удобен тем, что его оголять можно турбозажигой, а паяльником изоляция не плавится. Это много удобнее чем любым другим проводом.
17:33
А еще кайф в том, что его можно купить в любом чип и дип. Когда жил в Минске - даже у нас продавался.
17:33
Офтп - первое с чем сталкиваешься за границей, когда любишь паять - отсутствие мгтф провода😅
KL
17:38
Kirill Leyfer
как ты с этим справляешься?)
у меня МГТФ нет, но есть раздербаненный IDE шлейф - и вот, жилы кат.5
немного даже научился с ними работать - плюс в том, что изоляция как раз плавится паяльником, но в этом же и минус
у меня МГТФ нет, но есть раздербаненный IDE шлейф - и вот, жилы кат.5
немного даже научился с ними работать - плюс в том, что изоляция как раз плавится паяльником, но в этом же и минус
AS
17:38
Alexey Svetlov
In reply to this message
Стоит раз попробовать, и уже не хочется паять другими проводами😅
Y
17:39
YL3AKC
Есть и у китайцев всякие поделки. У меня валяется Wire wrap wire DM-30-100 UL1423, но не поробовал.
AS
17:41
Alexey Svetlov
Вот такой взял - не, совсем не то.
Y
17:42
YL3AKC
In reply to this message
Да, у меня такой, только красный. Ну... Попробую как не будь. А там видно будет.
AS
17:48
Alexey Svetlov
Его удобство еще в том что он есть достаточно тонкий но прочный. Лудится хорошо, и можно по месту, на нужной длинне откусить, оголить, залудить и припаятья
17:48
Очень рекомендую
17:49
Его удобство еще в том что он есть достаточно тонкий но прочный (не обламывается). Лудится хорошо, и можно по месту, на нужной длинне откусить, оголить, залудить и припаяться. Очень рекомендую, правда. Остальное просто боль…
Y
17:53
YL3AKC
На самом деле планируется фрезерованная печатная плата с минимум проводами.
https://t.me/gridcompasschat/3628
https://t.me/gridcompasschat/3628
17:54
Но там много резисторов. 48 штук. 2 гребенки (как и на этой плате). Ну и припаять ГПиБ провод припаять на плату.
AS
17:54
Alexey Svetlov
Да, я видел. Это классно, но как по мне - быстрее спаять чекнуть что по резисторам - если будет гуд - фрезеровать. Имхо😌
Y
17:55
YL3AKC
In reply to this message
Кирилл не такой маньяк по пайке как мы. Он больше по программированию.
🔥
AS
AS
17:57
Alexey Svetlov
Имею такой опыт: нарисовал и развел плату, отправил заказ, платы пришли, и… ты видишь, что ты перепутал полярность…🤬 🤦♂️
17:58
Бывало всякое, и чипы разводил зеркально😂😂😂 опыт, он не сразу такой…
Y
17:58
YL3AKC
In reply to this message
И такое бывает. Но я это уже переболел. По крайне мере когда знакомый делает платки и когда заказываю у китайцев.
👍
AS
18:00
Ошибки бывает только если фундаментально не правильно спроектировал и не работает. Но и это редко.
18:01
Иногда бывает что после прихода платы думаешь: ехх коннектор надо было на 2 мм подвинуть или надо было поставить удобней.
u
18:02
usernameak
со временем привыкаешь не делать тупые ошибки, и делаешь только очень тупые
🔥
Y
AS
AS
18:03
Alexey Svetlov
In reply to this message
Да, с коннекторами тоже тема! Все сделал, и вроде ок, а внешний разъем упирается в деталь какую, или еще чего🙈😂
Y
18:08
YL3AKC
Последую плату делал... У китайского прожектора сгорели мозги. Делал замену на атмеге. Платка с нуля, но надо было отверстия крепления, дисплей и кнопки поставить на те-же места. Сделали, спаяли. Дисплей на 1-2 мм не попал. Взяли оригиналую плату а там... тоже самое дисплей тоже на 1-2 мм не по месту. Вывод: китайцы - пидарасы. Я сделал так-же плохо как они.
😁
AS
18:09
Ну и когда делаешь кекпу (Hat) для малинки (Raspberry Pi), то там тоже много подводных камней в механике надо учитывать.
AS
18:58
Alexey Svetlov
In reply to this message
Я знаю одного маньяка… этот дружочек-пирожочек не смог поставить драйвер для микрухи ch340 на какой-то новый мак. Точнее драйвер стал но работал только на старых версиях микрух ch340c - версия ch340g не работала. Так он отпаял с ардуйни этот чип старой ревизии и припаял его в свисток на место нового😂 проблемка, только, что старым ревизиям чипов - нужен кварцевый резонатор и его на свистке небыло😂
u
AS
19:04
Alexey Svetlov
In reply to this message
Ага, нахера париться, если можно не париться - подумал он и припаял резанатор😂😂😂
u
19:04
usernameak
я бы полез чинить дрова)
👍
AS
AS
19:05
Alexey Svetlov
Вот, а человку проще чип перекинуть и еще не очень совместимый😂😂😂
19:06
работает - не трогай 😁
Y
21:50
YL3AKC
In reply to this message
@Megabozyakorovka Дай знать когда будет платка. Там надо будет МНОГО резисторов припаять. И есть нюансы в последовательности сборки.
16 June 2023
Y
05:42
YL3AKC
@Megabozyakorovka Для стрима желательно приготовить паяльник и резисторы с такими номиналами:
100 Ом - 1 шт на малинку
3.3 кОм - 1 шт на 5В
6.8 кОм - 1 шт на землю
Второй конец всех резисторов подключается на линию DIO7 (или другую для тестов).
То есть 100 ом между линий и малинкой. 3.3 кОм между линий и 5 Вольт
6.8 кОм между линий и землёй.
Код тест софта не проверен компилятором, там скорее всего будет глупые ошибки синтаксиса.
Тест надо провсести с подключенным ГРиДом.
Один тест когда ГРиД выключен. Тыкать осликом и смотреть на анализаторе
Сругой тест когда ГРиД включен, после не успешногй попытки загрузится. Когда линия данных успокоилась. Тыкать осликом и смотреть на анализаторе.
Можно и провести тесты без логического анализатора, но с осликом. А вдруг анализатор влияет на линий? Некогда не можем знать что там китайцы намудрильи.
100 Ом - 1 шт на малинку
3.3 кОм - 1 шт на 5В
6.8 кОм - 1 шт на землю
Второй конец всех резисторов подключается на линию DIO7 (или другую для тестов).
То есть 100 ом между линий и малинкой. 3.3 кОм между линий и 5 Вольт
6.8 кОм между линий и землёй.
Код тест софта не проверен компилятором, там скорее всего будет глупые ошибки синтаксиса.
Тест надо провсести с подключенным ГРиДом.
Один тест когда ГРиД выключен. Тыкать осликом и смотреть на анализаторе
Сругой тест когда ГРиД включен, после не успешногй попытки загрузится. Когда линия данных успокоилась. Тыкать осликом и смотреть на анализаторе.
Можно и провести тесты без логического анализатора, но с осликом. А вдруг анализатор влияет на линий? Некогда не можем знать что там китайцы намудрильи.
Y
06:01
YL3AKC
А если результаты будут положительные, то придётся на каждую линию вешать по 3 резистора. А это 48 штук (16 из каждого номинала). Чтоб не зае***ся, надо будет ЧПУшную платку паять. Но там не будет много проводов. Ну а резисторы не так уж скучно паять.
06:02
И да, если магазине нет именно таких, то можно кипить другие номиналы, которые билзки. Тоесть +/- 5 - 15% не проблема.
KL
19:23
Kirill Leyfer
стартанул осциллограф
19:23
умные люди, подскажите - я могу как в лог анализаторе записать сессию?
Y
19:23
YL3AKC
А я на работе. Особо не помогу в данный момент.
KL
19:23
Kirill Leyfer
лады, ща потыкаюсь
Y
19:24
YL3AKC
Вспомни азы. С начало продиагностицируй свой палец, чтоб вспомнить как надо крутить ослик.
KL
19:36
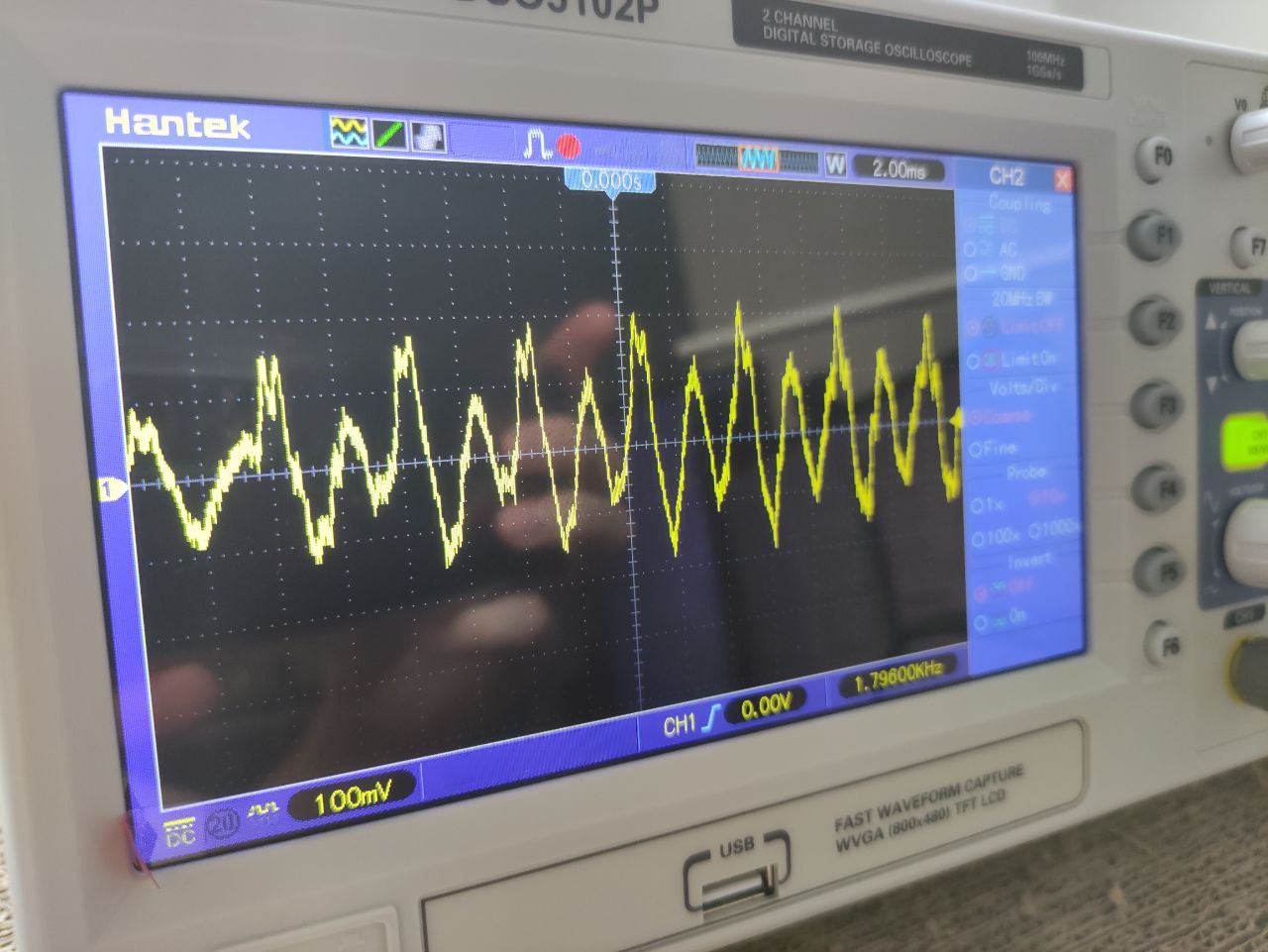
19:37
так, ща соображу как чё можно ли на флешку писать
Y
KL
19:40
Тогда как поймать сигнал?
Тестовой программой?
Тестовой программой?
Y
19:40
YL3AKC
Да, тестовой.
19:40
Иначе оочень сложно и не понятно будет.
KL
19:41
Kirill Leyfer
Окей
ВЗ
19:41
Хотя я с хантеками дела не имел
19:41
А, но есть по ним знакомый, мб знает
19:42
А и да, у него выход может какой на комп есть?
Y
19:42
YL3AKC
Волна орцилограммы не сохраняетс... Если... У тебя нет крутого Keysight или Tektronix.
KL
ВЗ
19:43
Владислав Задорожкин
Я вон показывал древний тектроник с GPIBом и RS232
KL
ВЗ
19:43
Владислав Задорожкин
In reply to this message
Мне кажется он должен работать как запоминающий
Хотя бы на отдельных участках
Хотя бы на отдельных участках
Y
19:44
YL3AKC
In reply to this message
Подключи к комодору. У ослика есть режим анализа видео сигнала.
19:44
Где именно спрятан? Не помню.
ВЗ
Y
19:50
Только что увидел что ты используеш режим кепчеринга. А это уже не бегиннер левел... Так мовно и поимать то, что тебе надо. Но сложно. Кептчуринг и тестовая программа. А там увидим что дальше делать...
KL
19:51
Kirill Leyfer
In reply to this message
Надо осилить триггер
Шоб осцилл сам стопанул когда увидит всплеск какой-то на канале и потом уже изучать кепчур
Шоб осцилл сам стопанул когда увидит всплеск какой-то на канале и потом уже изучать кепчур
19:52
In reply to this message
Плюс осцилл двухканальный, можно будет сразу оба поймать и сравнить наверн
Y
19:53
YL3AKC
Не в тему но для развлекухи с новой игрушкой...
KL
19:54
Будет задержка небольшая
Y
KL
20:10
Kirill Leyfer
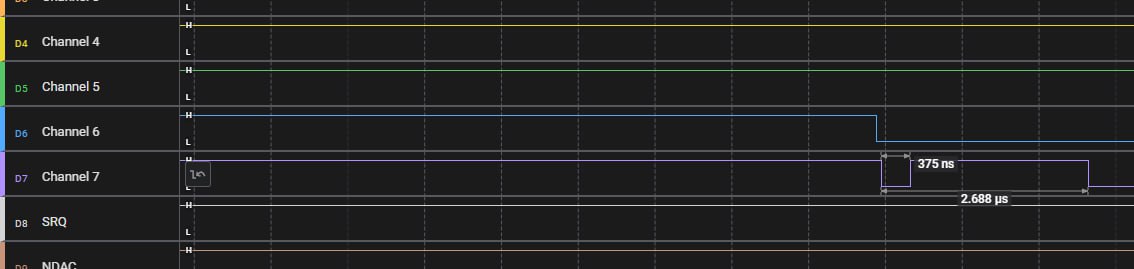
запустил тест, поймал аномалию
20:11
ща осциллом гляну чё как
20:11
о, ты круто сделал, циклом
я могу даже не триггерить ничего
я могу даже не триггерить ничего
ВЗ
20:11
Правда экран там... как не скажу что
20:12
Хотя чего я хочу от школьного говна 5мгц
KL
20:12
Kirill Leyfer
короче говоря, на 8 канале аномалии есть (не подтянутый), на 7 нет
20:17
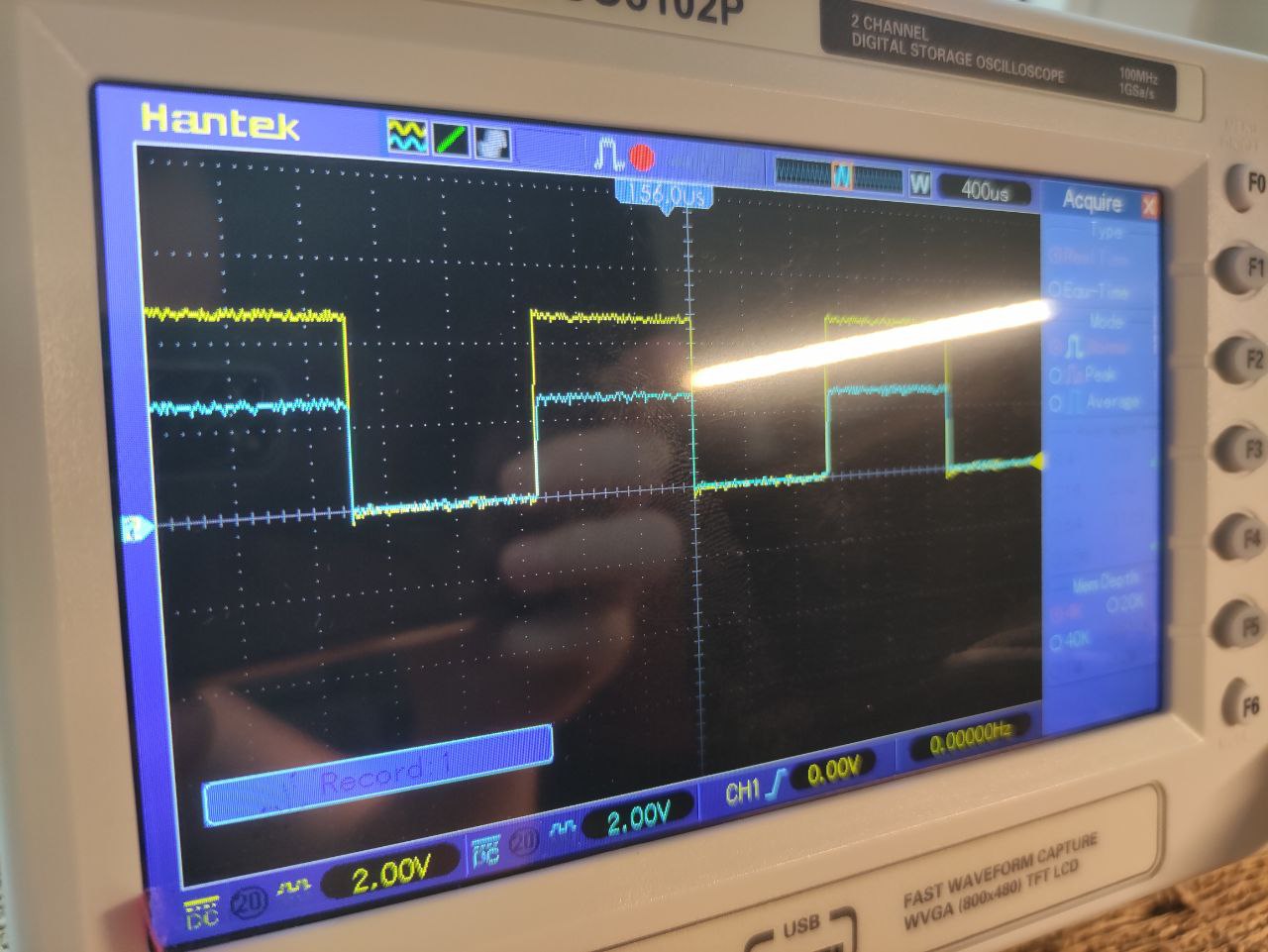
Опа
20:17
А как это так это
u
20:17
usernameak
а где
KL
20:18
Kirill Leyfer
Один канал это канал с подтяжкой резюком
20:18
Второй без
u
20:18
usernameak
а
20:18
я понял
20:18
внутренняя подтяжка малины живее всех живых)
KL
20:18
Kirill Leyfer
Деление по вертикали - 2в
20:19
Жёлтый - резюком
Синий - внутренняя
Синий - внутренняя
u
20:19
а у малины-то 3V3
KL
20:19
Kirill Leyfer
Короче малина подтягивает до 2.5в всего
ВЗ

KL
20:20
Kirill Leyfer
Хорошо, а комп что даёт? Можно писать огромные простыни логов?
20:21
Ну, семплов
ВЗ
20:21
Владислав Задорожкин
Надо глянуть, я полагаю что да
KL
KL
20:24
Kirill Leyfer
А
Артем 16.06.2023 20:21:42
можешь тогда скинуть картиночку для ЛУТ в пдф?
20:24
или просто как картинку
KL
ВЗ
KL
20:30
Попозже изучу, спасибо!
ВЗ
20:30
Владислав Задорожкин
In reply to this message
Ах да, с осликом диск вроде прилагается?
Что там на нем есть?
Что там на нем есть?
KL
20:30
Kirill Leyfer
In reply to this message
Supported devices: DSO2xxx Series, DSO52xx Series, 6022BE/BL
Я мимо
Я мимо
ВЗ
20:31
Владислав Задорожкин
In reply to this message
Ох уж эти модернисты
Собирают компы без привода, а потом "а куда диск совать"?
Собирают компы без привода, а потом "а куда диск совать"?
KL
20:32
Kirill Leyfer
In reply to this message
Я больше скажу, в новом системнике вообще нет 5.25" отсека
ВЗ
20:33
Владислав Задорожкин
In reply to this message
А у нас DSO5102P
Кстати не факт что пролет
Я помню, что 5102 от 5202 отличались только программной конфигурацией. И одно легко превращалось в другое через UART к системе (и ослик из 100мгц становился 200мгц)
Может даже и так заработает, я думаю должно
Кстати не факт что пролет
Я помню, что 5102 от 5202 отличались только программной конфигурацией. И одно легко превращалось в другое через UART к системе (и ослик из 100мгц становился 200мгц)
Может даже и так заработает, я думаю должно
KL
20:34
Kirill Leyfer
Ох блин
Сложно
Я как-нибудь в другой раз нырну в эту rabbit hole
Сложно
Я как-нибудь в другой раз нырну в эту rabbit hole
20:34
Ладно, жду что Янис скажет про подтяжку, пока вырубаю установку
ВЗ
20:35
Владислав Задорожкин
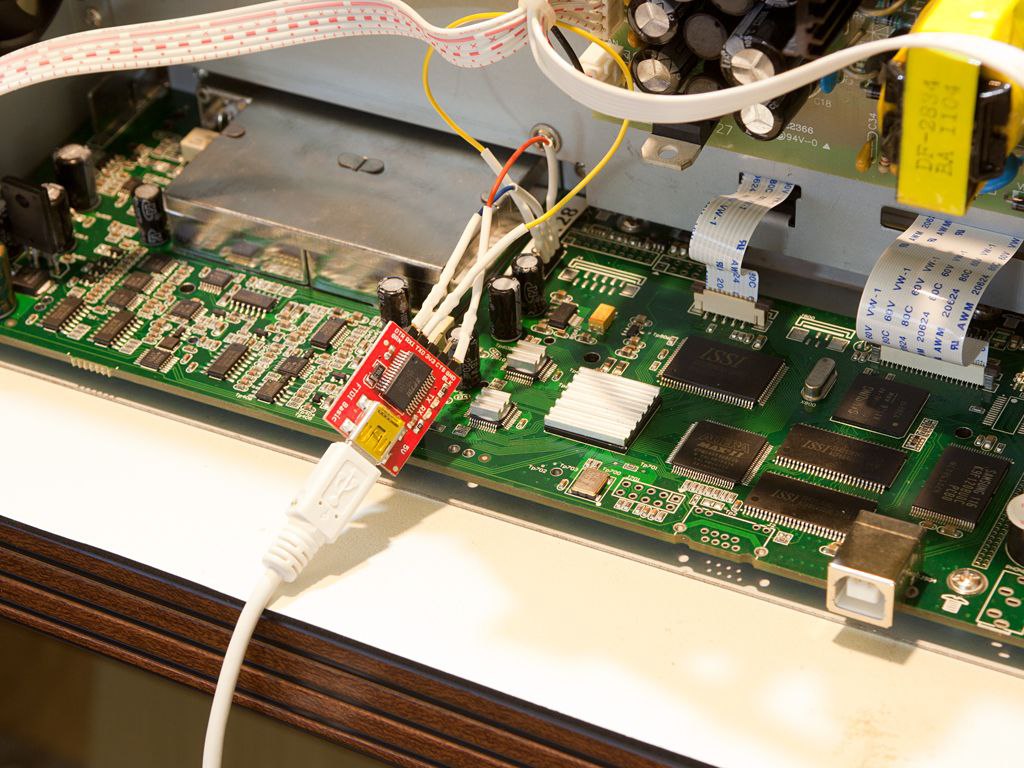
Во, как-то так хехе
20:36
У меня во всех стоят по DVD-RAM
20:36
Ибо никогда не знаешь, когда тебе понадобится считать сидюк
20:37
А то и записать
Y
20:45
In reply to this message
А если одновременно анализатором и осликом посмотреть на тесты?
А ГРиД подключен и включен?
А ГРиД подключен и включен?
KL
20:52
In reply to this message
Анализатор выдает сигнал, в котором на линии без подтяжки на 5в есть аномалии
Y
20:53
YL3AKC
Аха... Ну "поздравляю" с пайкой 16 резисторов на 10 кОм...
KL
20:53
Kirill Leyfer
Кек
Y
KL
Y
20:54
YL3AKC
Ну и нагревай паяльник. Или завтро до/во время стрима.
20:54
In reply to this message
Подключи, но подожди пока ГРиД выдаст ошибку загрузки и только потом смотри осликом.
KL
Y
20:57
YL3AKC
In reply to this message
Птоб прошла попытка загризки через ГПиБ и ГРиД испокоился и не дергал пины.
KL
21:00
Kirill Leyfer
хорошо, сейчас просто гляну сначала, меняется ли значение на линиях при включении и загрузке грида
Y
21:01
YL3AKC
Ну... Короче есть чем занятся... Еще много дел и нюансов...
KL
21:03
Kirill Leyfer
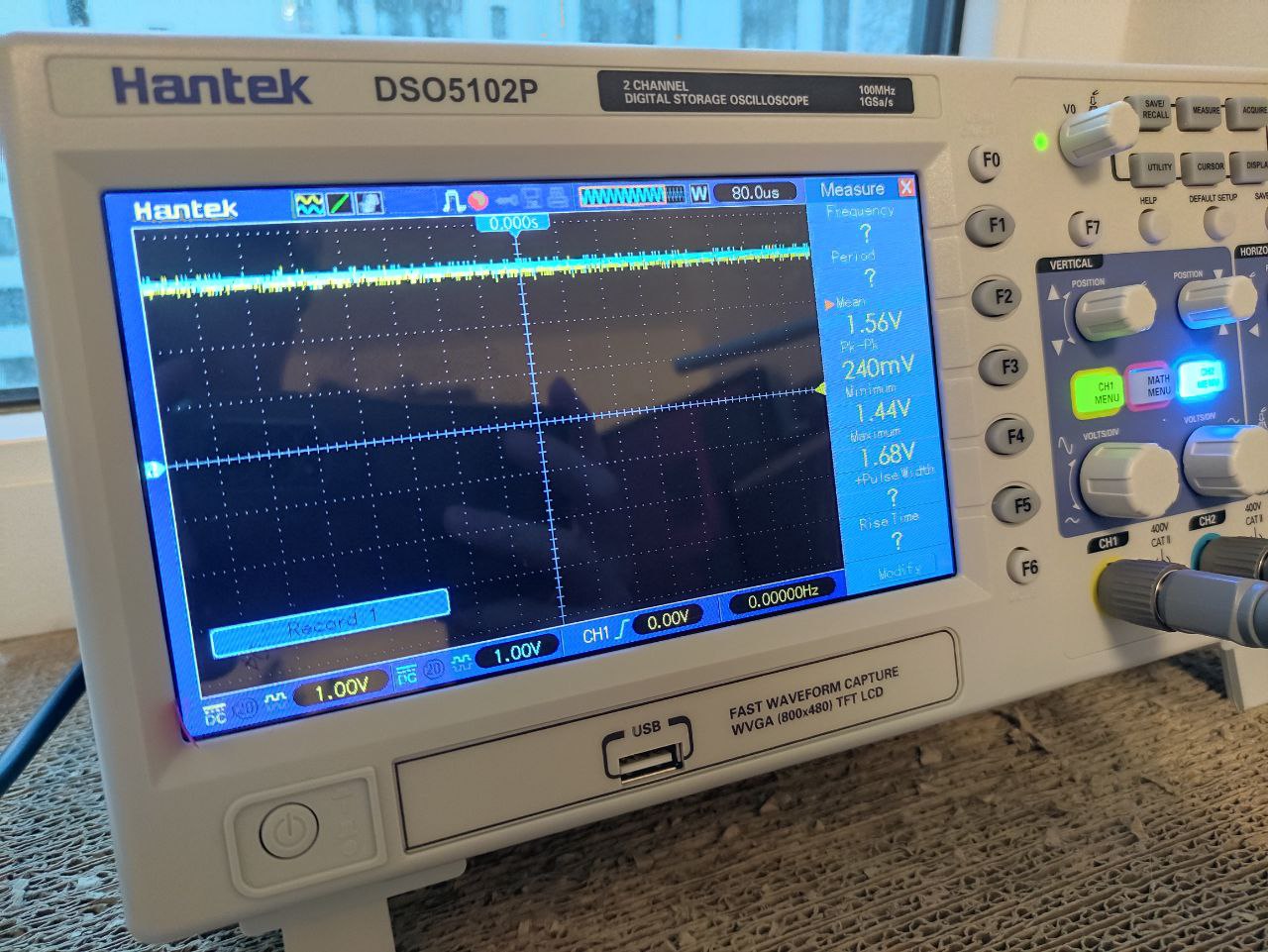
При включении грида без запуска теста вот так
21:03
1.5 вольта на обеих линиях
Y
21:04
YL3AKC
Как ГРиД перестанет дергать (после 1-10 секунд), так и запускай.
21:04
К стати, у меня в коде было много ошибок?
KL
21:06
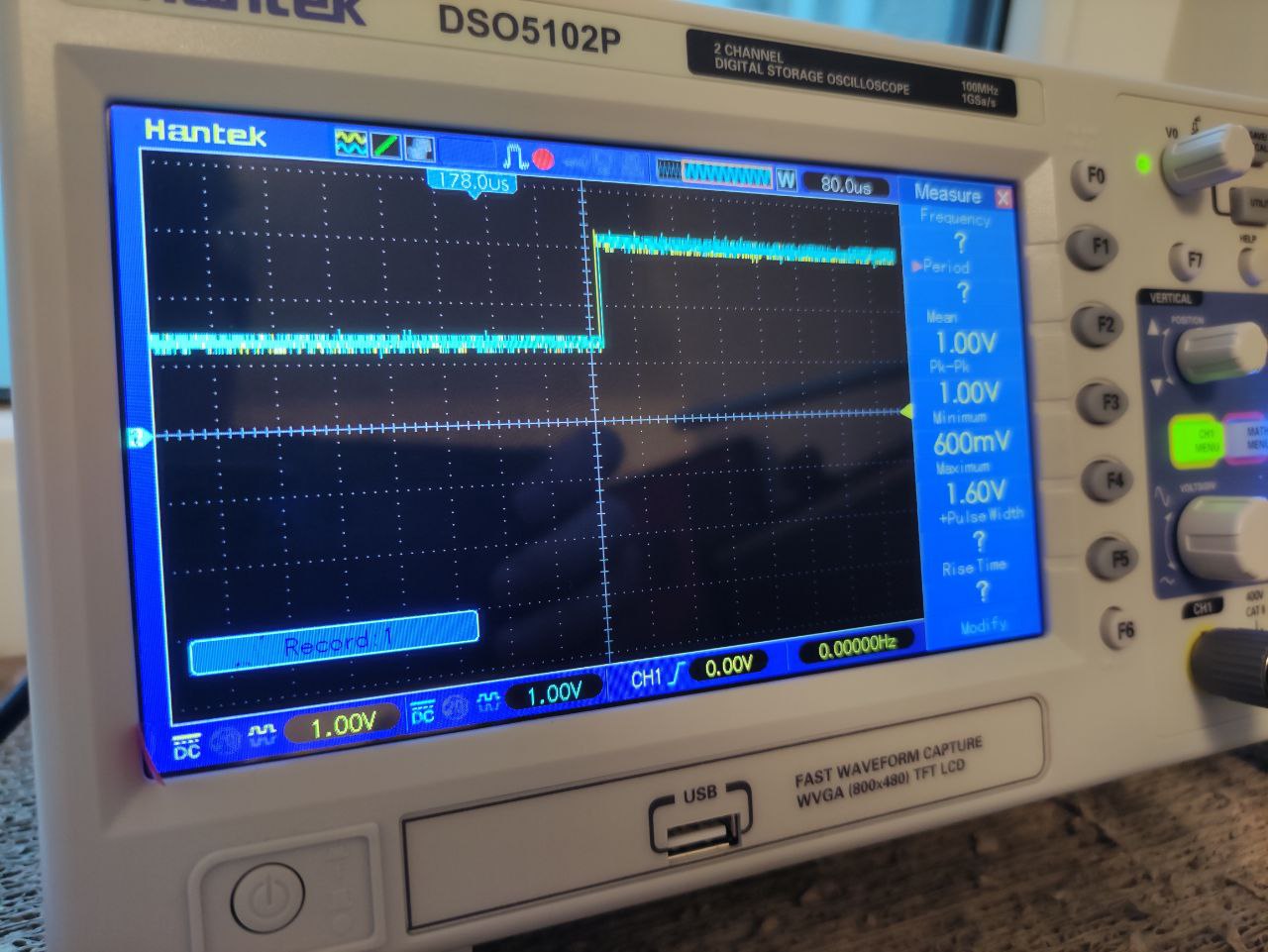
А вот тест с включенным гридом
Y
21:07
YL3AKC
Возмовно надо сделать в тесте 2. параметр.
Инициализирует пины
GPIO_IF_initialise();
uDelay(arg2);
while(1) {
active();
active();
delay(arg1):
passive();
passive();
}
Ну суть уловил. Код инициалисирует пины, вдет некое время (10 секунд/ 10 000 000 микросекунд) и только потом начинает колбасить кины для тестов.
Инициализирует пины
GPIO_IF_initialise();
uDelay(arg2);
while(1) {
active();
active();
delay(arg1):
passive();
passive();
}
Ну суть уловил. Код инициалисирует пины, вдет некое время (10 секунд/ 10 000 000 микросекунд) и только потом начинает колбасить кины для тестов.
21:08
In reply to this message
Деление 1 вольт?
Малинке трудно дергать пины. Но уровни вроде почти в норме.
Малинке трудно дергать пины. Но уровни вроде почти в норме.
KL
Y
21:10
YL3AKC
In reply to this message
Оййй. Не так уж хорошо... Блин! Надо будет с тремя резисторами. Тоесть плану делать на ЧПУ...
KL
21:10
Kirill Leyfer
In reply to this message
Не думаю что это нужно
Я включил грид, включил осцилл, и сигналы сразу висели на уровне 3в
И спустя 10-15 секунд и несколько попыток загрущки я изменений не видел
Я включил грид, включил осцилл, и сигналы сразу висели на уровне 3в
И спустя 10-15 секунд и несколько попыток загрущки я изменений не видел
21:12
Просто при включении грида
Y
KL
21:13
Kirill Leyfer
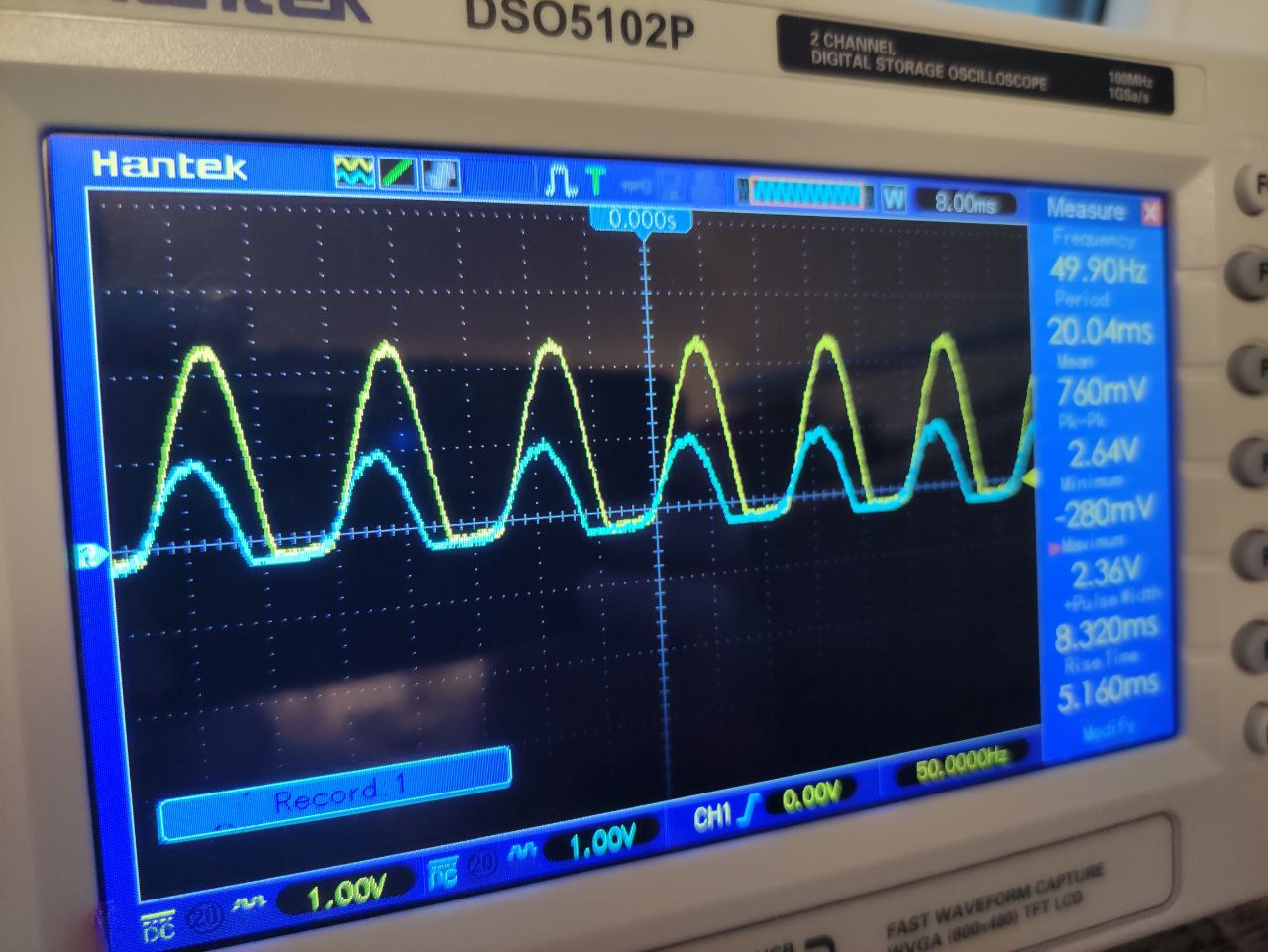
Ой, на выкл гриде вижу полувыпрямленную сеть
Y
KL
21:14
Kirill Leyfer

Y
KL
21:15
Kirill Leyfer
Да, без пихи картинка та же - на обеих линиях 3 вольта
Y
KL
21:18
Kirill Leyfer
Блин, жаль реального флопа нет под рукой, не сравнить показания
Y
21:19
YL3AKC
Как бы микрухи рабоатет на 5 вольт, и должен быть 5 вольт уровень. Но вроде мовно и на 3 быть.
Ту часть ГПиБ пока полностю не исследовал.
Ту часть ГПиБ пока полностю не исследовал.
u
21:19
usernameak
In reply to this message
микруха работает через драйвер, а не напрямую к порту подведена
KL
21:19
Kirill Leyfer
In reply to this message
И ещё, объясни пожалуйста, а что схема с тремя резисторами сделает (или скорее должна сделать) с сигналом?
21:20
In reply to this message
А драйвер - имеется в виду какой-то элемент на плате?
Который конвертирует напряжение?
Который конвертирует напряжение?
Y
21:21
YL3AKC
Срзу много вещей. резисторы на пирание и земпля, терминирует линию чтоб не было отражений, и, вроде, загоняет линию в режим.
u
21:21
usernameak
In reply to this message
конвертирует напряжение, стабилизирует сигнал, делает пуллап и так далее
21:21
и у него на выходе 3.3в
Y
21:21
YL3AKC
Ну а 100 ом для малины, это для того чтоб немучить пины самой малины.
u

KL
21:22
Kirill Leyfer
In reply to this message
Т.е на 5в подтягивать даже скорее вредно и мы только мешаем микрухам?
Y
21:22
YL3AKC
In reply to this message
Не то чтоб сразу напряжение ковертирует, но шаманит с пуллапами и пулдаунами в соответстий с стандартом.
KL
21:22
Kirill Leyfer
И надо подтягивать на 3.3?
Y
21:23
YL3AKC
In reply to this message
Неа, микрухи сильные, им нравится. А вот малионка слабая ей трудно стянуть на ноль.
KL
Y
21:24
YL3AKC
In reply to this message
3.3 В скорее побочный эффект от пуллапов, но это как раз наруку для малинки.
21:24
Такс
KL
21:24
Kirill Leyfer
In reply to this message
То есть проблема этого сигнала в том, что низкий уровень находится не на 0в, а на 1.6?
Y
21:25
YL3AKC
надо бы попробовать изменить в тестовом коде логику active() и passive() таким образом чтоб малинка вообще не пользовалась пуллапом и посмотреть.
KL
21:25
Kirill Leyfer
Сек
Y
21:26
YL3AKC
In reply to this message
Да. 1.6 проблема. На сколько большая? Ммм... надо почитать даташит.
Ну а пока ЧПУ плата... Тоже ждет...
Ну а пока ЧПУ плата... Тоже ждет...
KL
21:26
а уровень нуля?
u
Y
KL
u
21:28
21:28
странно что тут не указано максимальное
21:29
то есть 1.6 для него вообще ни то ни другое
KL
u
KL
u
21:29
usernameak
последняя колонка это MAX
KL
21:29
блин
21:29
ну тогда ваще всё ясно
u
21:30
usernameak
а у тебя к осциллографу земля хоть подключена?
KL
21:30
Kirill Leyfer
так, ща без пуллапов сделаю
Y
21:30
YL3AKC
In reply to this message
Ага. там надо заставить быть меньше 0.8 вольт. По ходу малинки не хватает силы на такое.
Где-то было написано про Raspberry pi pin strenght и как его программно изменить.
Где-то было написано про Raspberry pi pin strenght и как его программно изменить.
KL
21:30
Kirill Leyfer
это считается?
u
KL
21:30
Kirill Leyfer
ок
Y
KL
21:31
Kirill Leyfer
In reply to this message
соединяется, мы же распаяли платку так, чтоб земля провода шла в землю пихи
Y
KL
21:36
Kirill Leyfer
Без pull-up с выключенным гридом странно
21:36
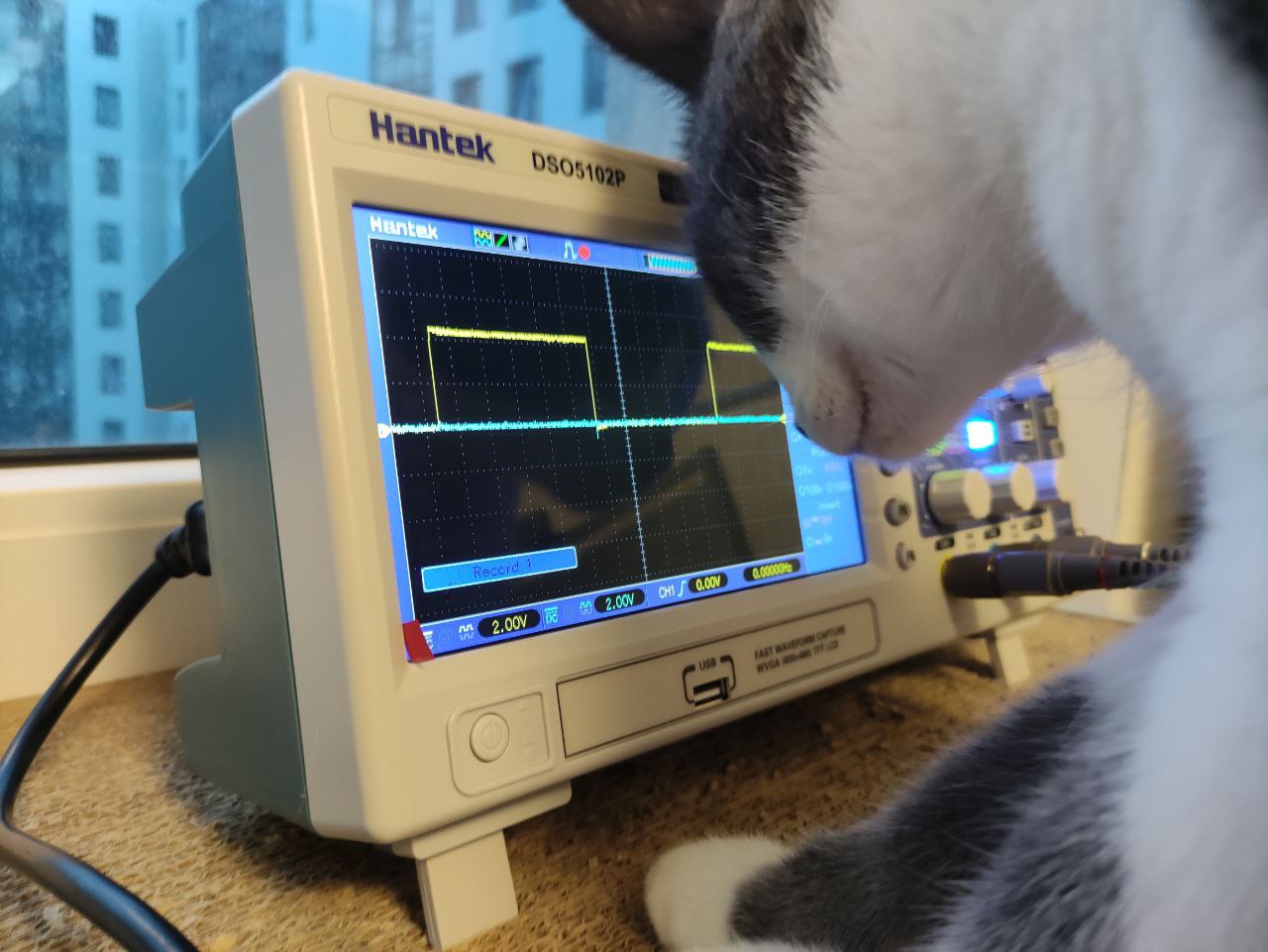
Второй канал (не подтянутый) вообще молчит
21:37
А, стоп, так так и должно же быть
21:37
Щас включу грид и посмотрю что будет
Y
21:37
YL3AKC
In reply to this message
В документе по микрухам было сказано что они что-то хорошее делает в выключенном состяний. Типа не мешает остальным...
KL
Y
KL
21:39
Kirill Leyfer
Огонь, спасибо огромное!
Y
21:39
YL3AKC
Но там есть нюансы во время пайки.
21:42
In reply to this message
Кликаем на CAM processing, Выбераем слой дорожек ин принтер типа PS (Postscript)
Ну а потом уилита ps2pdf
Легко. Сложнее вспомнить как надо рисовать плату чтб можно было изготовить на ЧПУ. Благо я когда-то тоже так делал и примерно помню нюансы. А они есть.
Ну а потом уилита ps2pdf
Легко. Сложнее вспомнить как надо рисовать плату чтб можно было изготовить на ЧПУ. Благо я когда-то тоже так делал и примерно помню нюансы. А они есть.
KL
21:43
Kirill Leyfer
Так. Без внутреннего pull-up картина та же.
Y
21:43
YL3AKC
К стати, спецы оценили твой дорогой ослик. Говорит что аппарат по сравнений с Frnsi и подобными игрушками.
KL
21:44
Kirill Leyfer
Что ж, это радует)
Y
KL
21:44
Kirill Leyfer
Но я так понял, что нет предела совершенству и там в чате пошли постить какие-то мега дорогие и крутые вещи
21:45
Или даже если и да, то лучше не мучить?
Y
21:45
YL3AKC
In reply to this message
Да, да. Продавай почку и покупай Keysight, tektronix, Rode & Swartz
21:45
Я даже не умея правильо написать те бренды...
21:46
К стати у CuriousMarc сильно дорогой от Keysight.
Слюня течет когда смотрю на него в видосах.
Слюня течет когда смотрю на него в видосах.
KL
21:47
Kirill Leyfer
In reply to this message
Ну, ему можно, он каждый день пользуется наверное почти всем набором фич, которые там есть
Y
21:48
Там и спонсорвсто и неявная реклама.
21:49
Тоесть не реклама, а он толковый дядька и его смотят. А там Ослик правильный.
21:49
Keysight сами доплачивает за такое. И без рекламного контракта.
21:51
К стати. А это уже почти продакшн версия с микросхемами. Хоть заказывай на JLPCB PCBway
21:53
GPIO pins set to output
The Raspberry Pi's GPIO pins are quite versatile, and you can modify many of their characteristics from software. You can turn on/off input pin hysteresis, limit output slew rate, and control source and sink current drive capability from 2 mA to 16 mA in 2 mA increments. These properties are set for the GPIO block as a whole, not on a pin-by-pin basis.
The Raspberry Pi's GPIO pins are quite versatile, and you can modify many of their characteristics from software. You can turn on/off input pin hysteresis, limit output slew rate, and control source and sink current drive capability from 2 mA to 16 mA in 2 mA increments. These properties are set for the GPIO block as a whole, not on a pin-by-pin basis.
KL
21:55
GPIO input hysteresis (Schmitt trigger) can be on or off, output slew rate can be fast or limited, and source and sink current is configurable from 2 mA up to 16 mA. Note that chipset GPIO pins 0-27 are in the same block and these properties are set per block, not per pin. See GPIO Datasheet Addendum - GPIO Pads Control. Particular attention should be applied to the note regarding SSO (Simultaneous Switching Outputs): to avoid interference, driving currents should be kept as low as possible.
21:55
Текс. Тут надо разобратся досканально...
u
21:56
usernameak
помнишь ты говорил что у грида на гпиб 5в?
21:56
как видишь, оказалось, что нет :)
Y
21:57
YL3AKC
In reply to this message
* IEEE-488 connector or 2x12 pinhead
* 2x20 pinhed for RPi
* 1x SN75160 (DIP or SO8)
* 1x SN75161 (DIP or SO8) or SN75162 (DIP or SO8)
* 2x20 pinhed for RPi
* 1x SN75160 (DIP or SO8)
* 1x SN75161 (DIP or SO8) or SN75162 (DIP or SO8)
21:57
KL
21:58
Kirill Leyfer
Понял) в принципе, можно уже щас заказать по парочке штук
Y
21:59
YL3AKC
In reply to this message
С одной стороны там как бы 5В, но сругой стотоны, оказывается там пуллапы и пуллдовны садят на 3В
u
KL
22:00
Kirill Leyfer
Да, кстати
Я не успел купить резюки для схемы с тремя резюками
А я так понял, без этой схемы лезть дальше смысла нет, т.к ноль на 1.6в не устранить без неё
Поэтому наверное завтра стримить грид смысла не особо?
Я не успел купить резюки для схемы с тремя резюками
А я так понял, без этой схемы лезть дальше смысла нет, т.к ноль на 1.6в не устранить без неё
Поэтому наверное завтра стримить грид смысла не особо?
Y
22:00
YL3AKC
In reply to this message
Немного подожди... Надо ззакончить .И Штепсель стоит как феррари. 10 Евро!
u
22:00
usernameak
In reply to this message
бтв чипы в DIP-корпусе почему-то стоят дороже и встречаются реже, чем в SOIC
Y
22:00
YL3AKC
In reply to this message
Надо поробовать переключить ток на пинах. пка не знаю как, но есть ссылка.
https://elinux.org/RPi_Low-level_peripherals#Interfacing_with_GPIO_pins
https://elinux.org/RPi_Low-level_peripherals#Interfacing_with_GPIO_pins
KL
22:01
Kirill Leyfer
In reply to this message
Штепсель это конечно трындец просто
Я бы лучше купил кабель за 1000 рублей и распилил на два - получится, что один коннектор выйдет в 7 евро)
Я бы лучше купил кабель за 1000 рублей и распилил на два - получится, что один коннектор выйдет в 7 евро)
Y
22:02
YL3AKC
In reply to this message
160 для данных.
161/162 для линий управления. Там отличается логика.
Ну и 162 круче 161. Смотреть TMS9914 datasheet.
161/162 для линий управления. Там отличается логика.
Ну и 162 круче 161. Смотреть TMS9914 datasheet.
KL
Y
22:03
YL3AKC
In reply to this message
Не плого. Вот по этому там на плате есть и гребенка 2ь12 и под штепсель...
22:03
Да, я хиртый и опытный...
22:03
Но ладно.
KL
Y
22:04
YL3AKC
Надо покушать и почитать про ток на пинах. Как там изменять и повисить.
KL
22:04
Kirill Leyfer
In reply to this message
Так, я сейчас попробую вот это сделать
Ща посмотрю что у меня за резюки есть
Ща посмотрю что у меня за резюки есть
Y
ВЗ
Y
22:05
Там главное соблюдать пропорцию между 3.3 и 6.8 кОм
22:07
In reply to this message
Для этого сучестует хистеричка-манячка "пржки да ножки". Просто надо кинуть фотку и она сама всё сделает.
ВЗ
KL
22:09
Kirill Leyfer
In reply to this message
тааак, есть следующие номиналы
10 кОм
4.7 кОм
1 кОм
220 Ом
100 Ом
10 кОм
4.7 кОм
1 кОм
220 Ом
100 Ом
Y
22:10
In reply to this message
ВЗ
Y
22:11
YL3AKC
In reply to this message
Она вычислит. Ибо сталкерит за Кириллом прямо на маниакальном уровне. Не зря её колбасит когда я что-то дерское говрю.
KL
Y
22:13
YL3AKC
In reply to this message
Давай постепенно. Аргументо в коммандной строке? 2; 4; 8; 10; 12; 14; 16
22:13
Н и понаблядать на ослике.
u
22:14
usernameak
In reply to this message
мне кажется ей может не хватить питания если слишком много поставить
Y
22:14
YL3AKC
Не хочется сразу на вю мочность ибо не спалить пины на малинке
22:14
In reply to this message
СКорее пины на малинке пострадают. Ибо малинка может до 16 мА, а драйвера может на 50 мА.
KL
Y
22:16
YL3AKC
ОК. Я жрать.
KL
22:19
там по дефолту сила была 8
я выставил 2
я выставил 2
22:19
получил вот чё
22:19
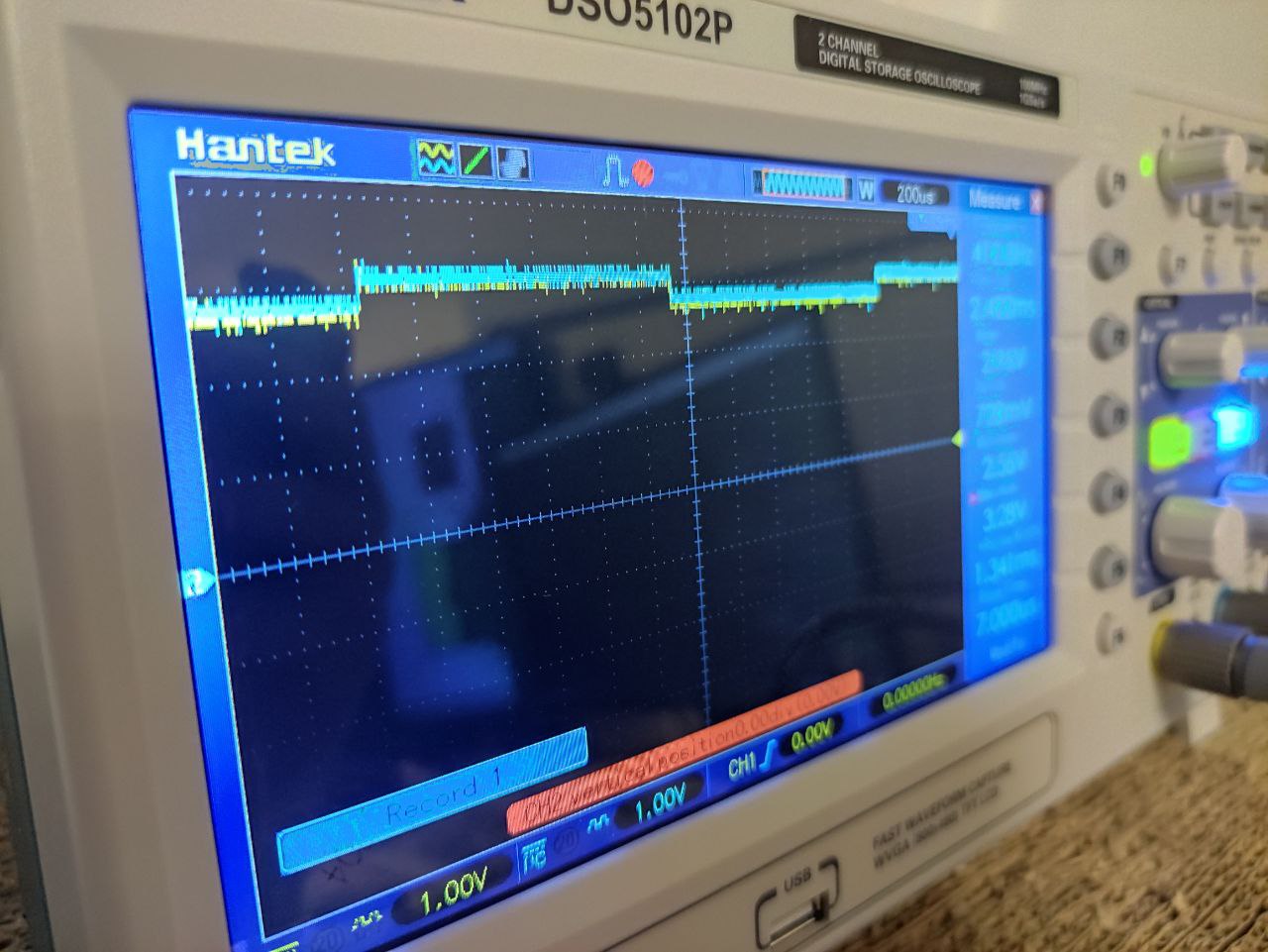
22:20
Ща 10 поставлю
Y
22:21
YL3AKC
Ну да. Луче сегодня написать фишку с током и напаять резисторы. Чтоб завтро на стиме народу не надо было смотреть как ты паяешь.
К- Контент!
К- Контент!
KL
22:21
Kirill Leyfer
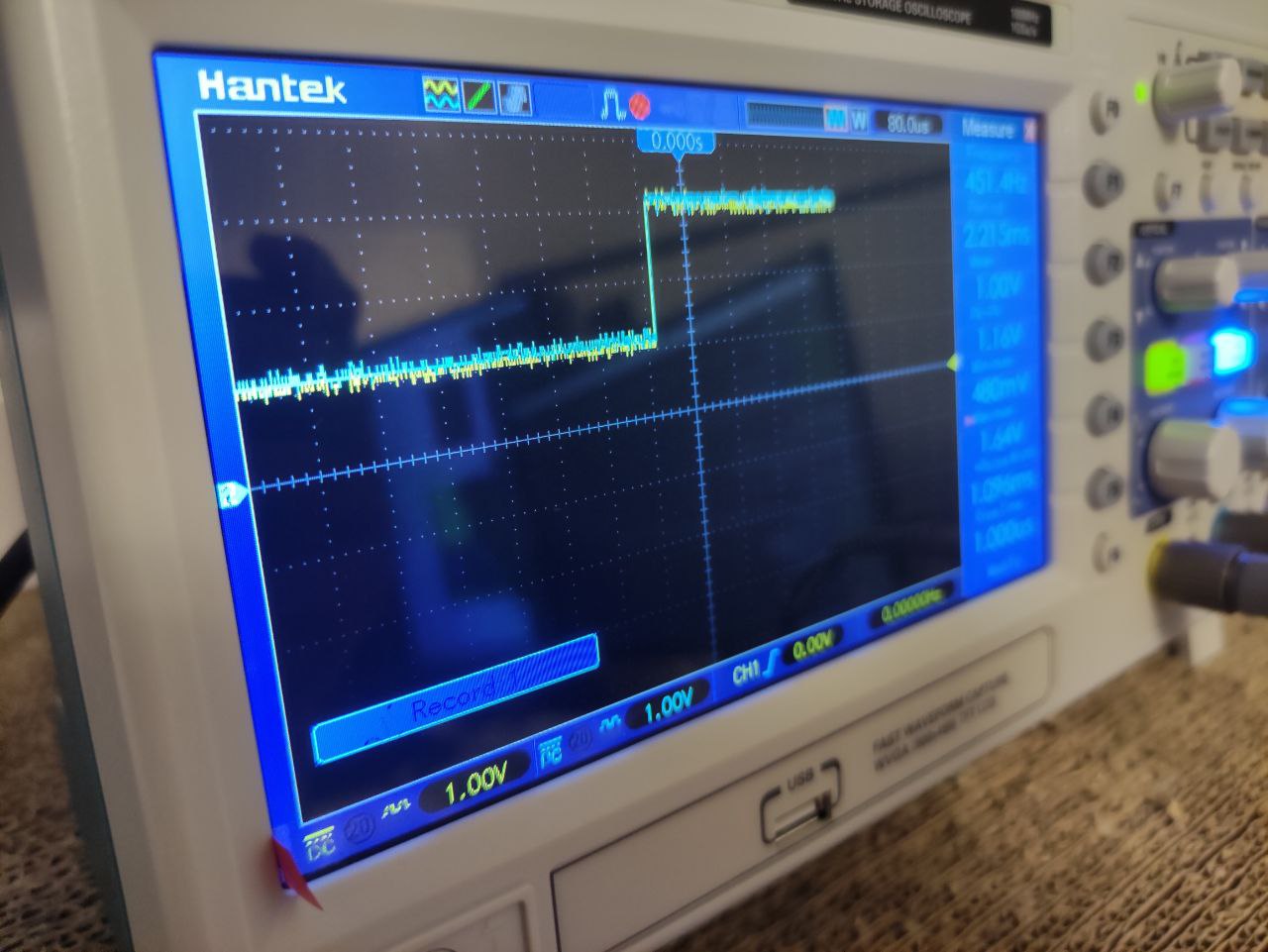
10мв - ноль на 1в
Y
22:22
Ну и поставь сразу в код, чтоб потом не надо было параметр вбивать.
KL
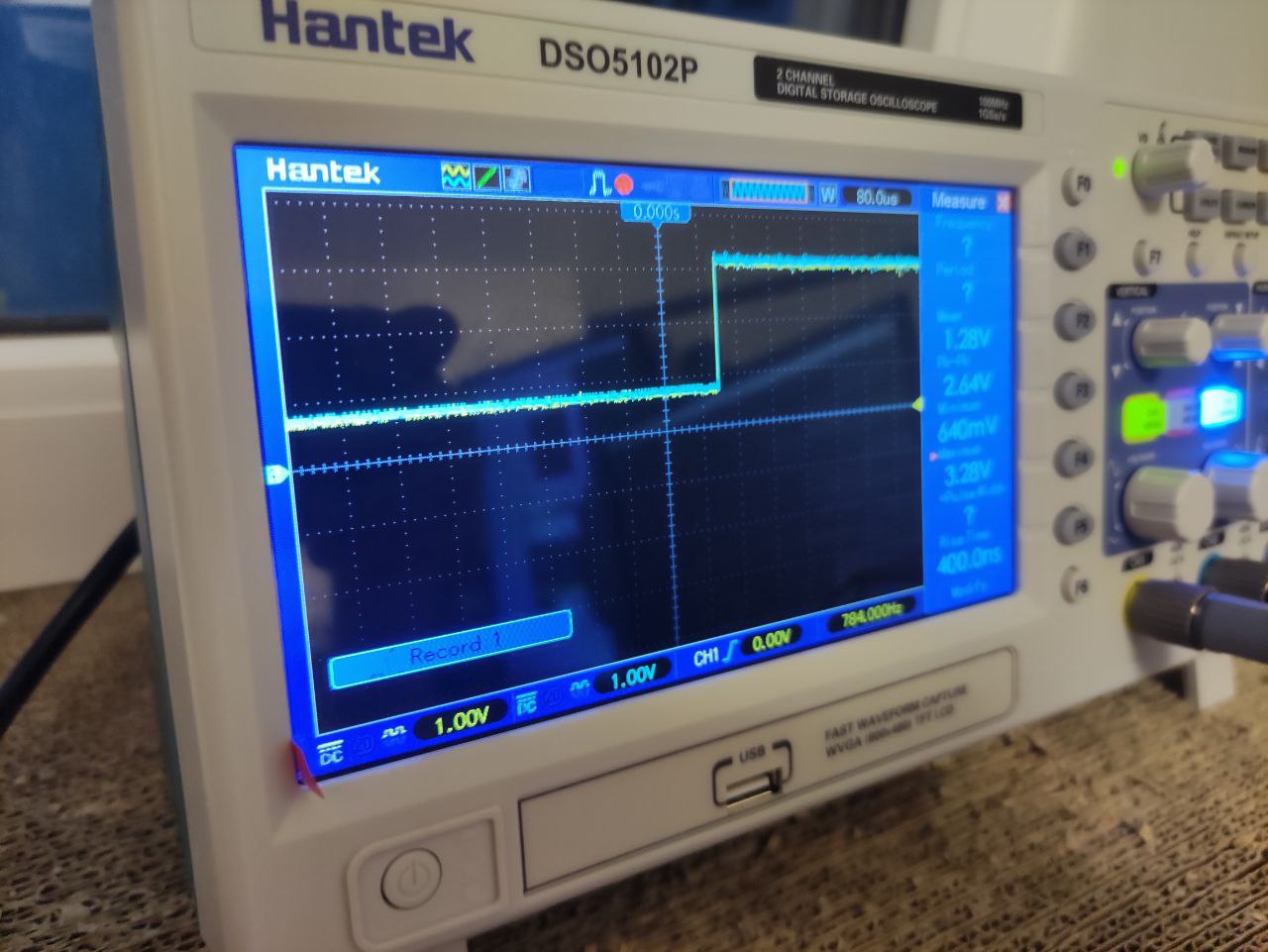
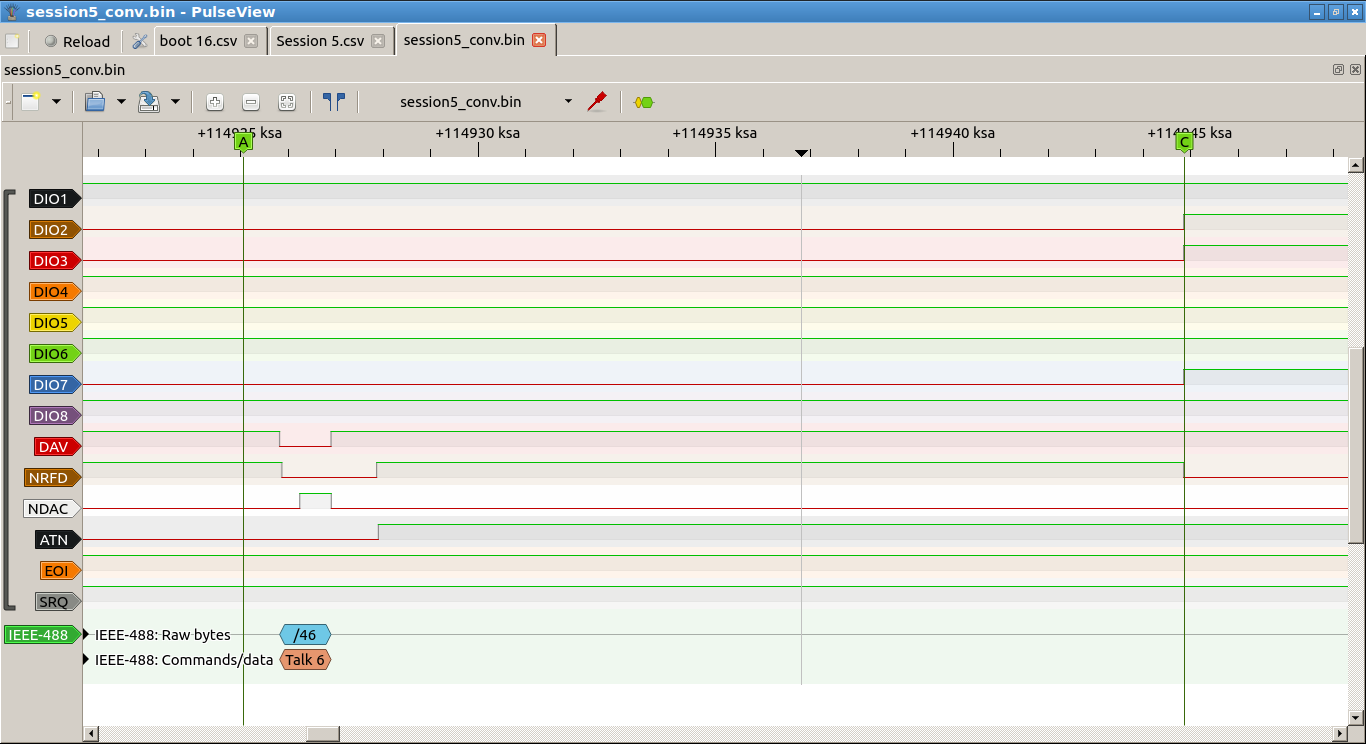{kind=link}
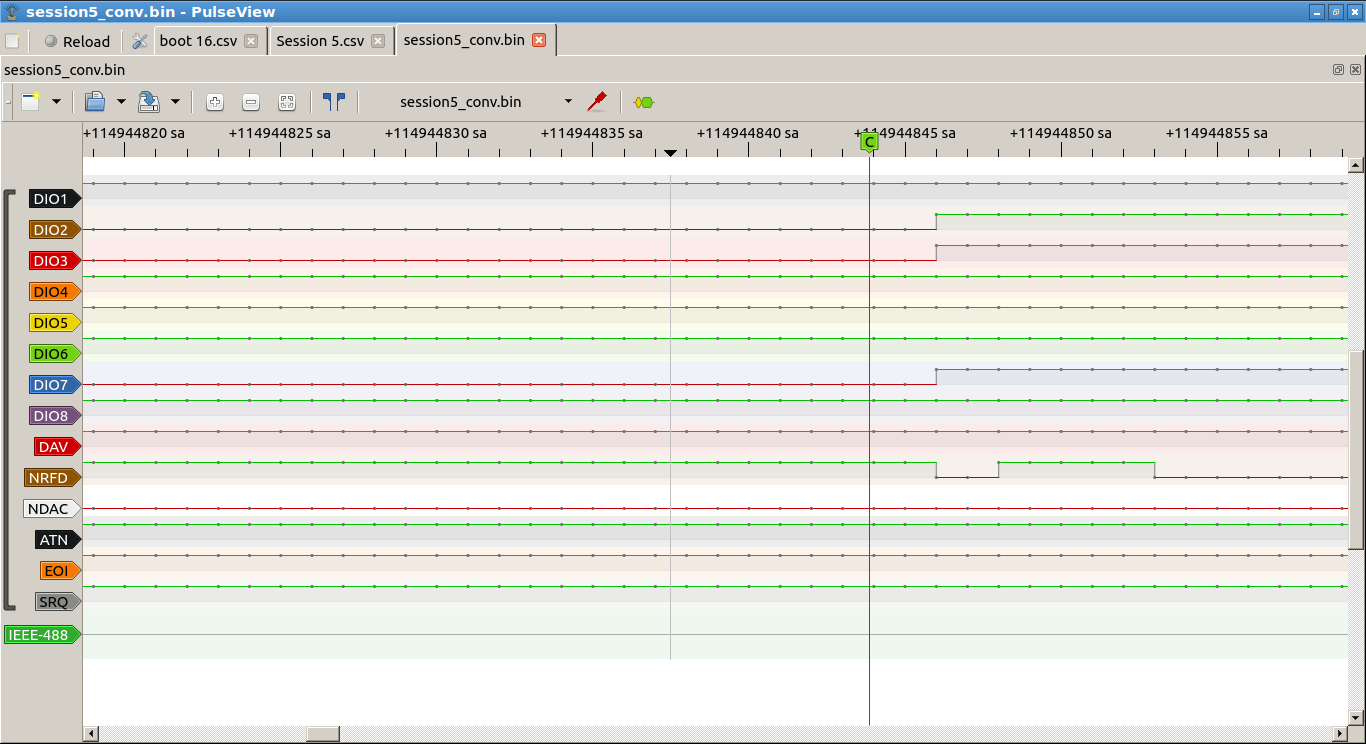{kind=link}
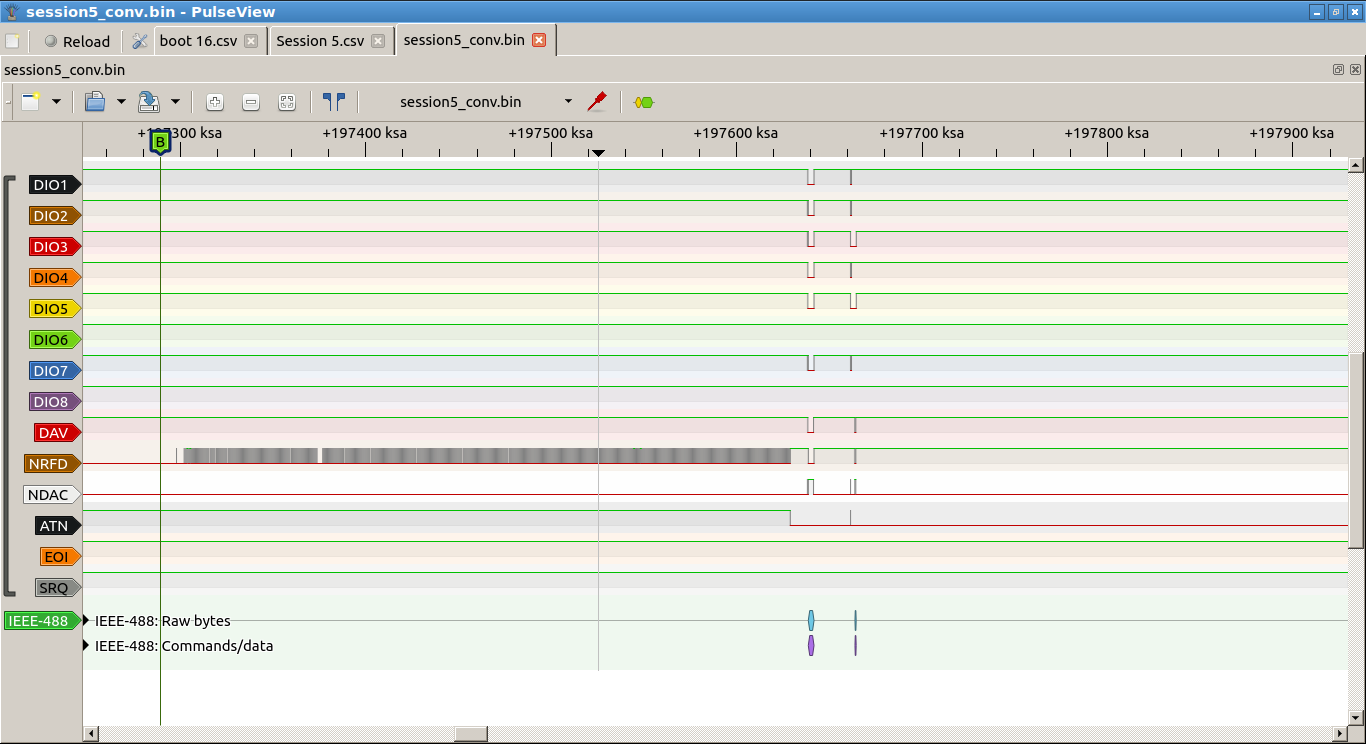{kind=link}
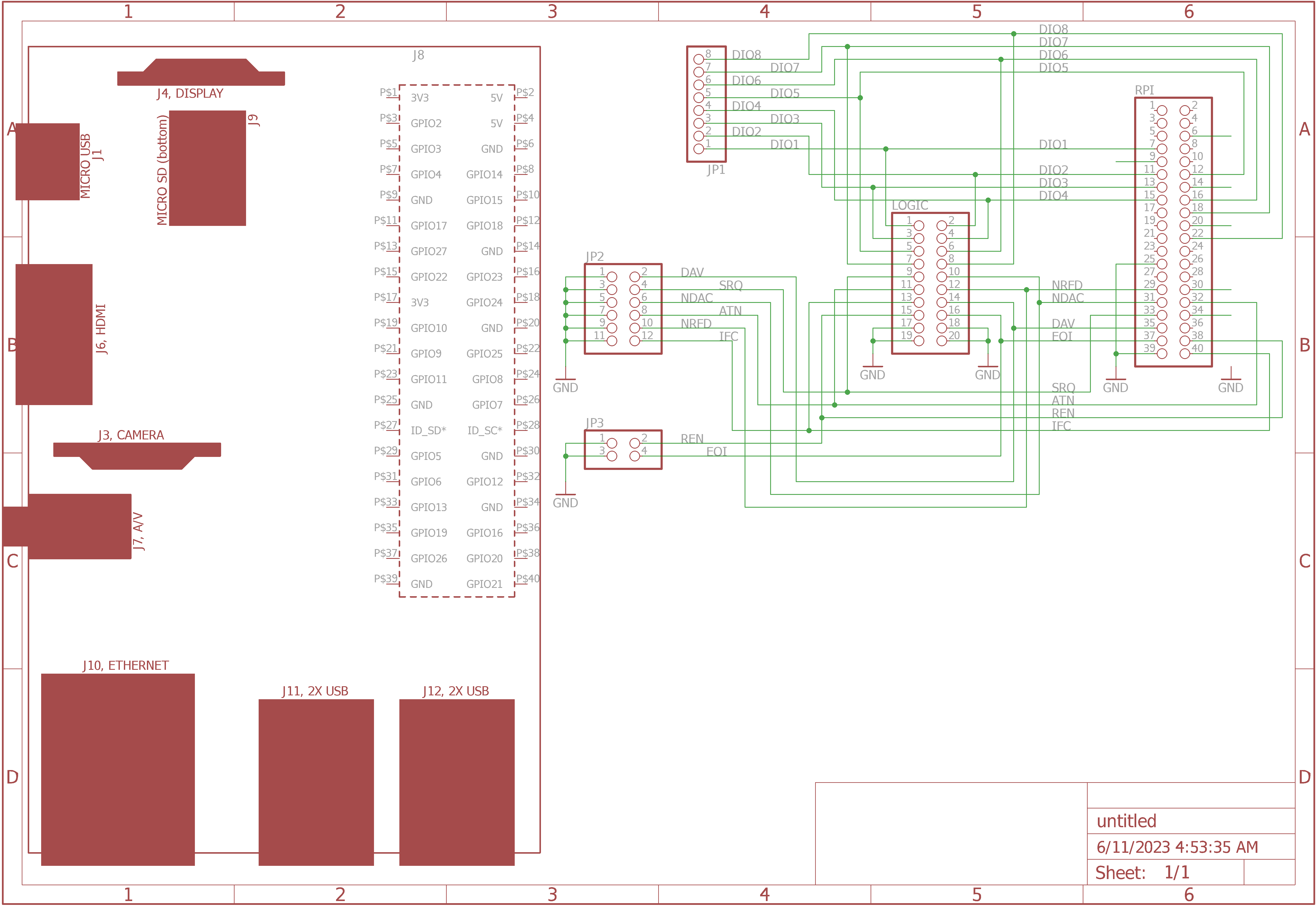{kind=link}
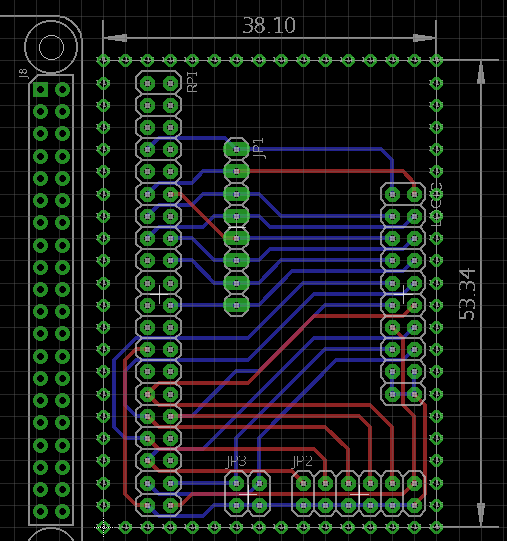{kind=link}
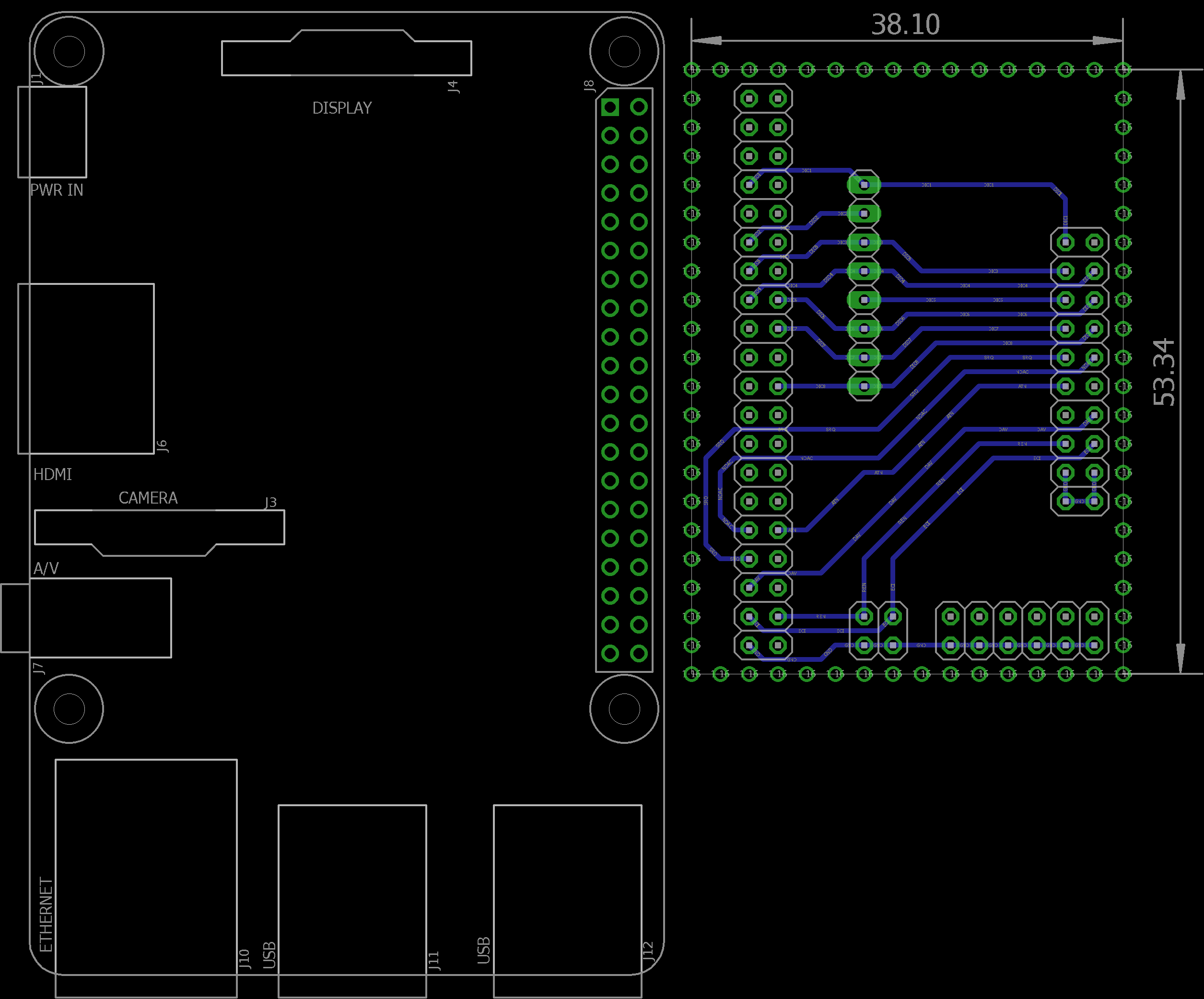{kind=link}
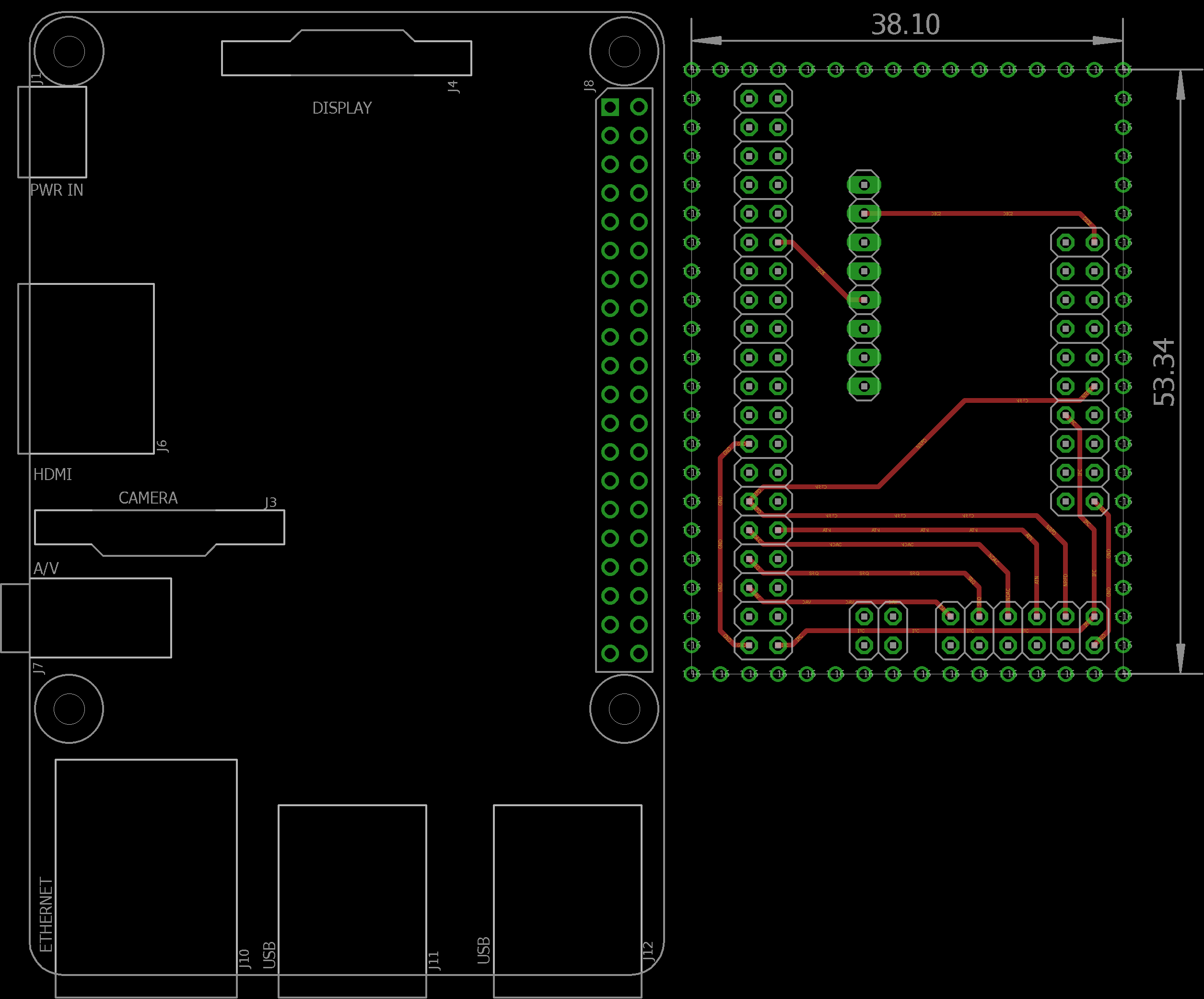{kind=link}
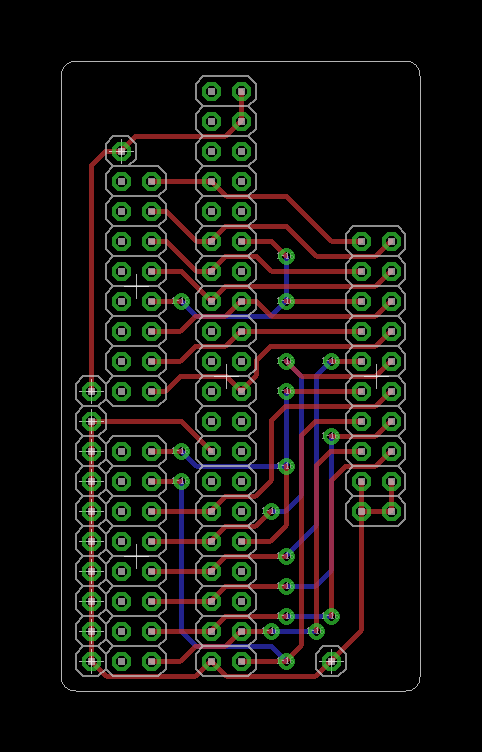{kind=link}
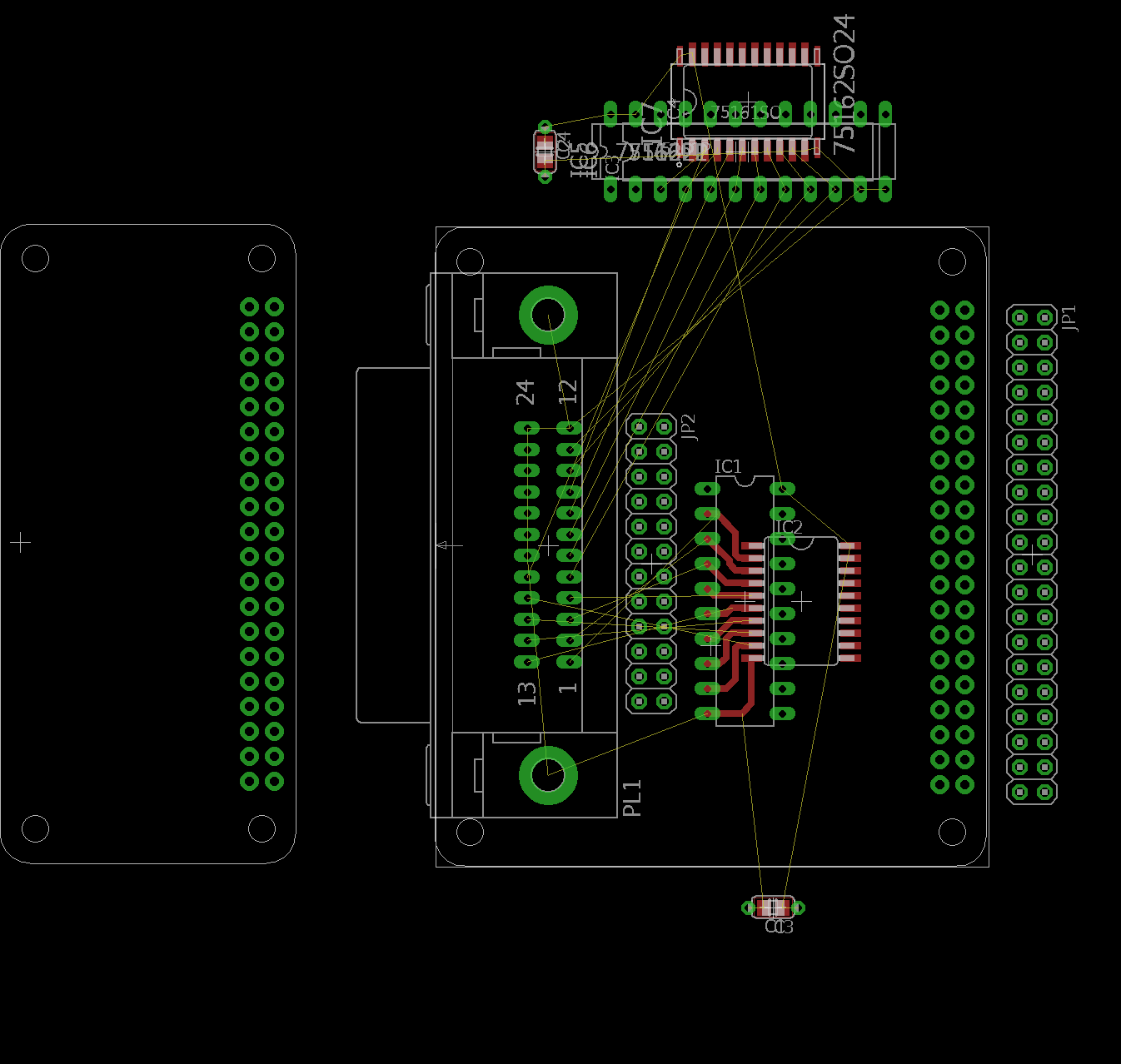{kind=link}
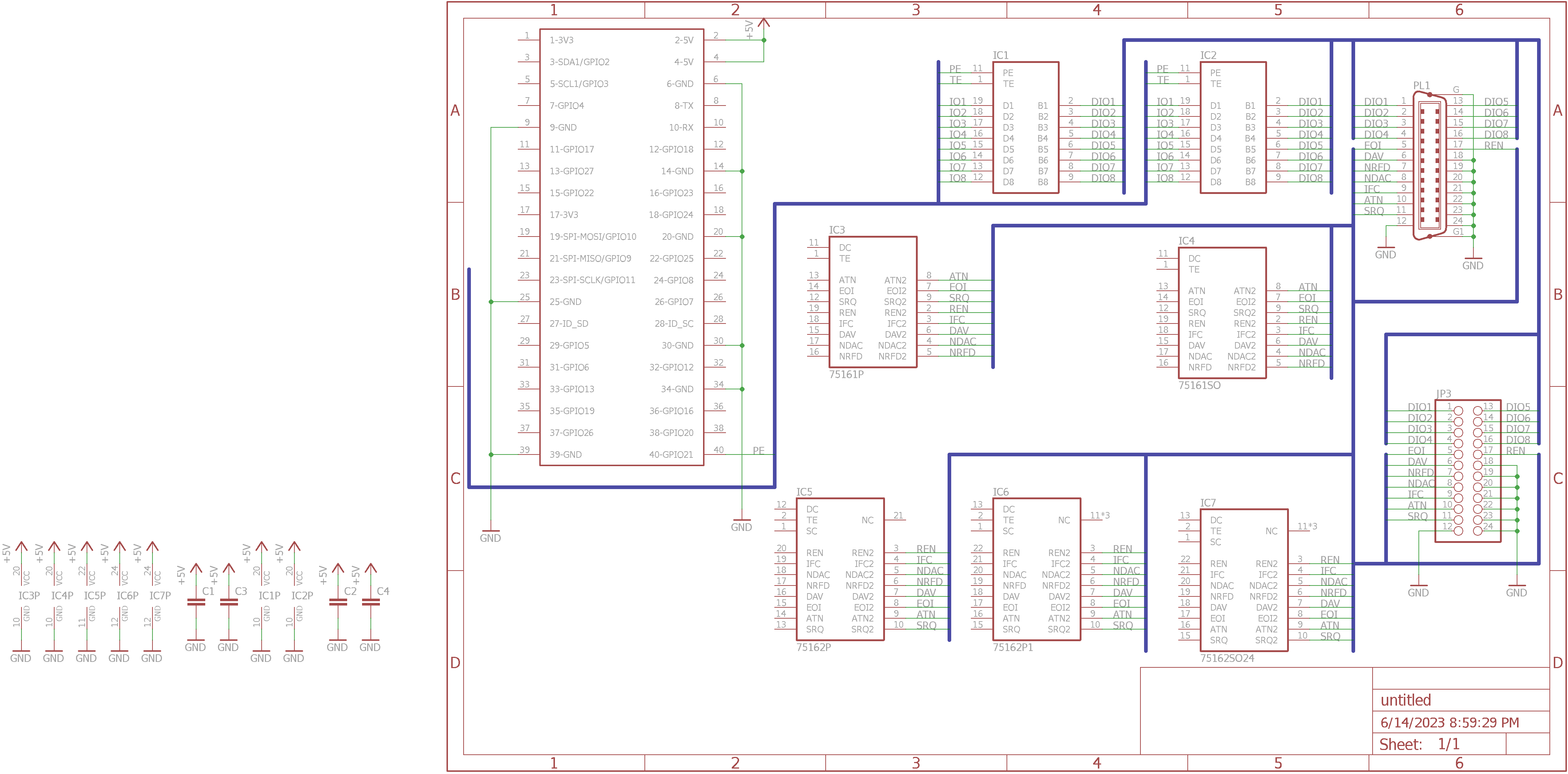{kind=link}
.png){kind=link}
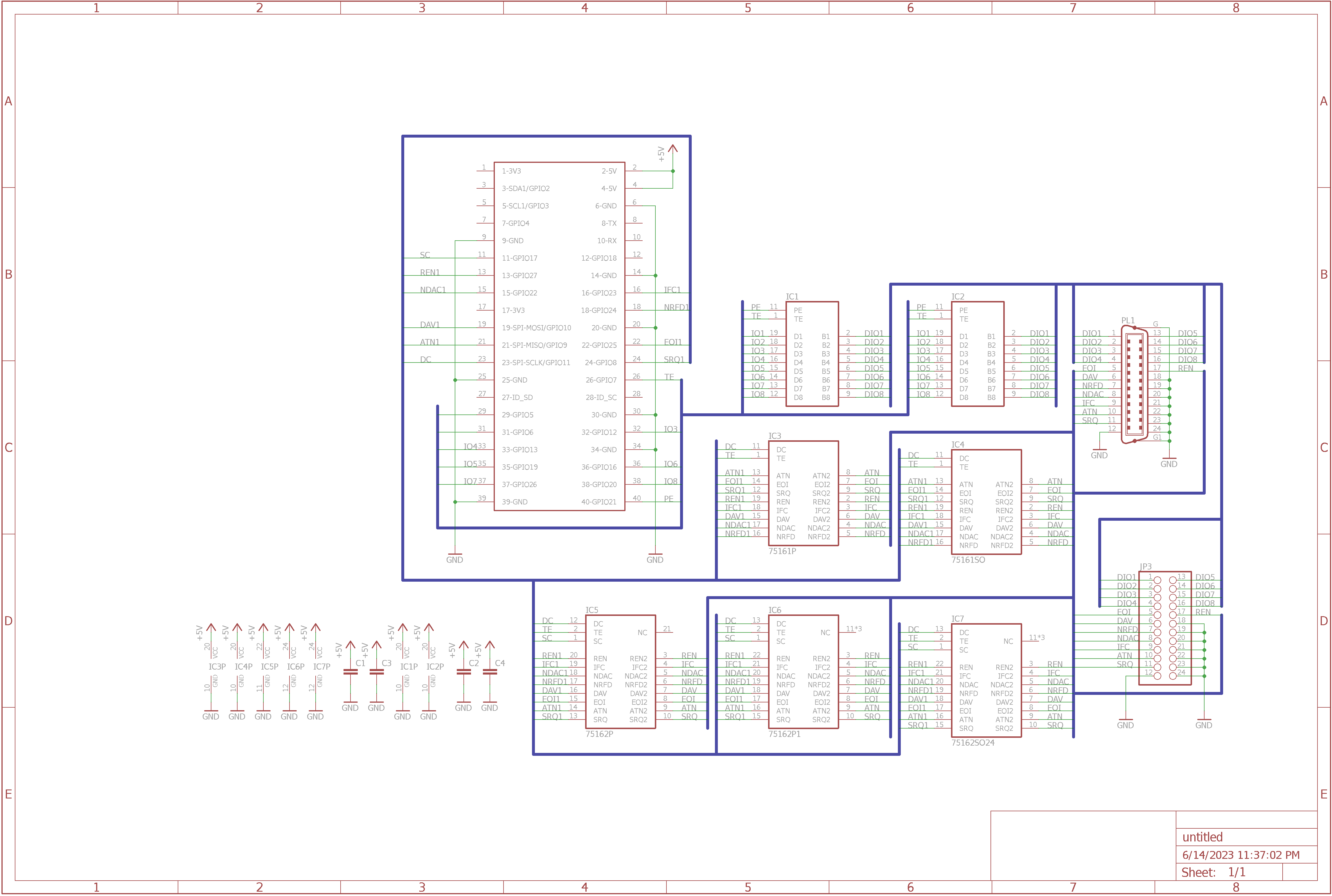{kind=link}
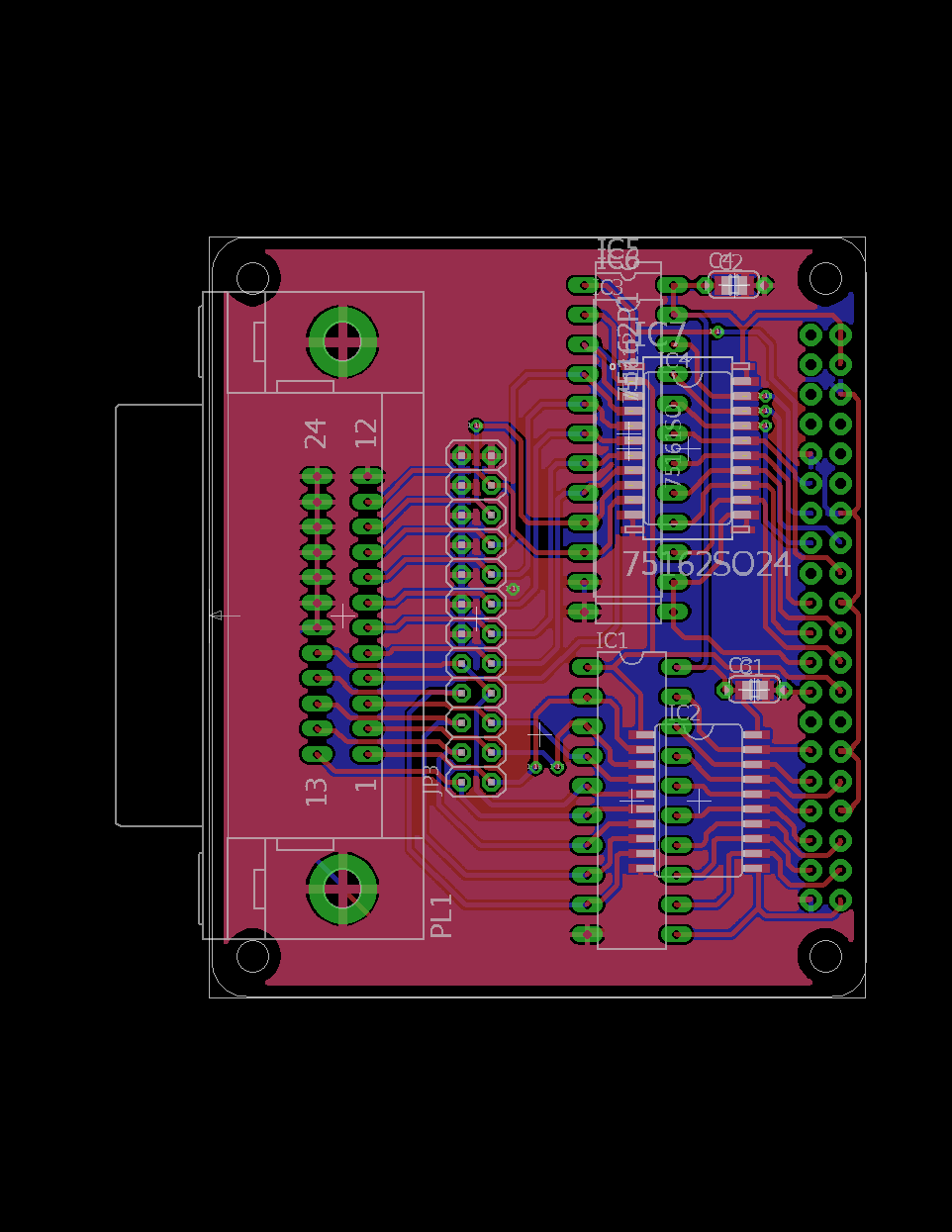{kind=link}
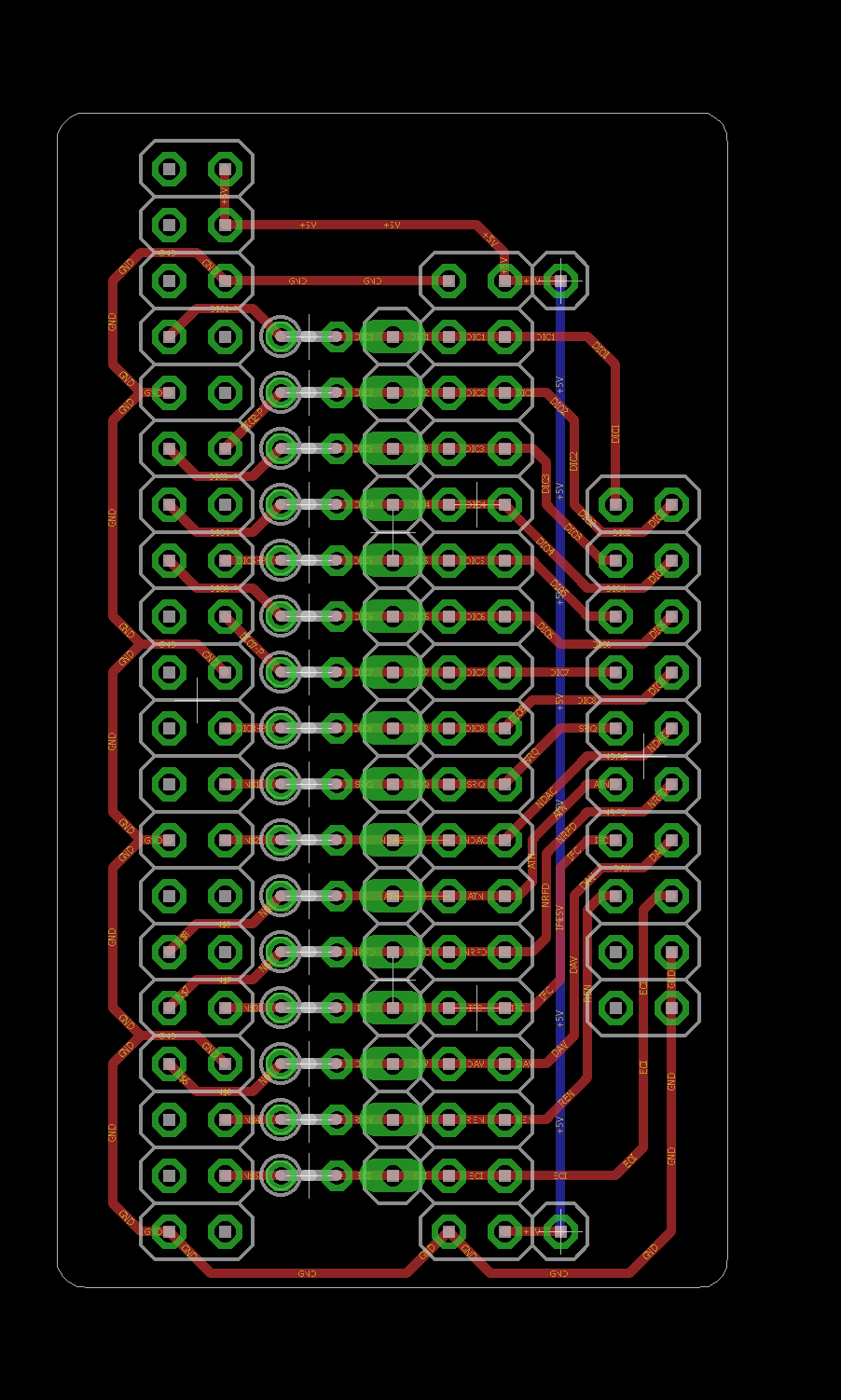{kind=link}
{kind=link}
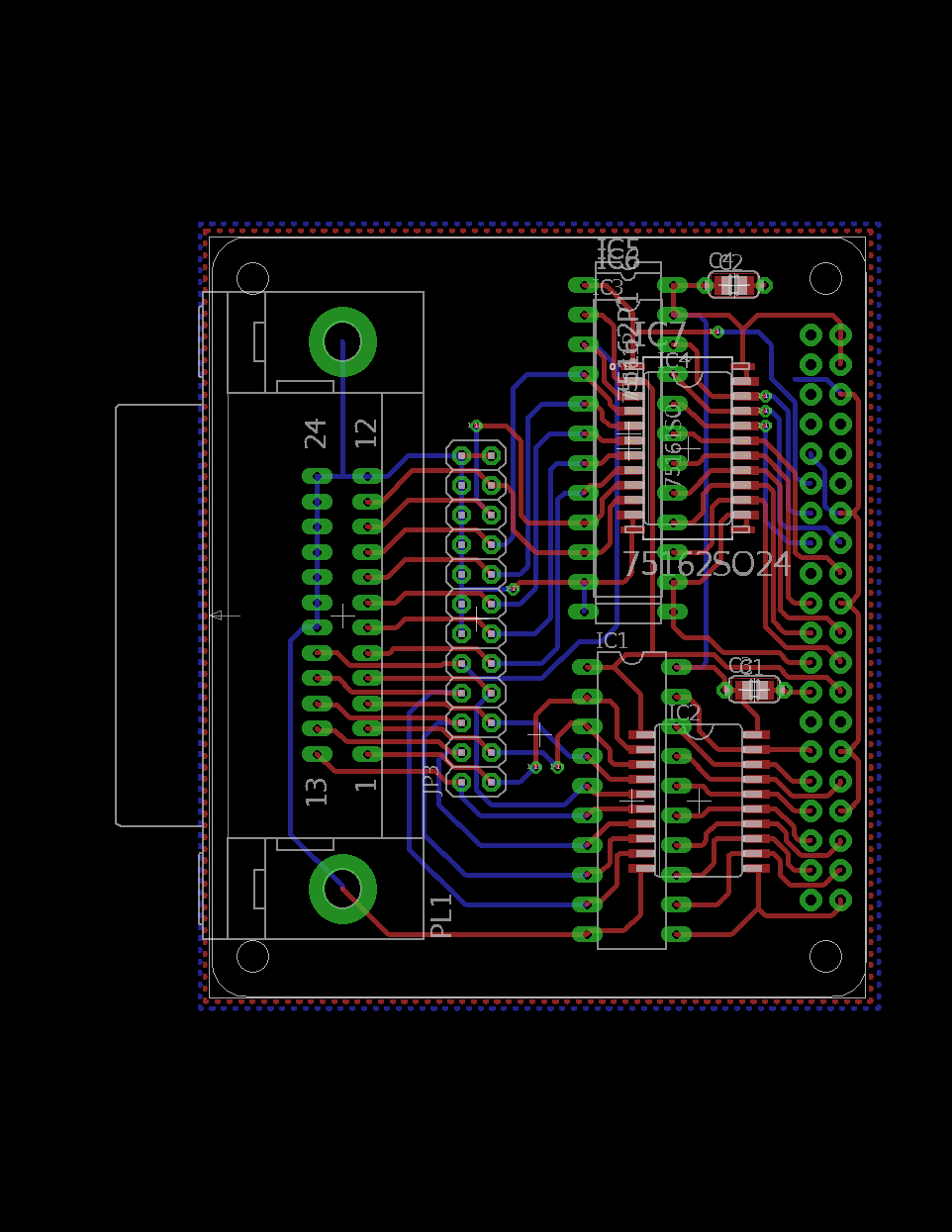{kind=link}
22:23
Но это канеш на грани
Y
22:23
YL3AKC
Ну и завтро примерно после стрима скинешь код для архивирования.
KL
22:23
Kirill Leyfer
Надо напаять
Y
22:24
YL3AKC
Тестовый код. Но завтра после стрима. А вдруг ты что-то еще добавишь.
KL
22:24
Kirill Leyfer
In reply to this message
Блин
чуваки
Вы охрененные
Люблю вас
Очень крутые
У меня впервые появилась надежда, что это говнище заработает))))
чуваки
Вы охрененные
Люблю вас
Очень крутые
У меня впервые появилась надежда, что это говнище заработает))))
u
Y
22:25
YL3AKC
К стати! Я тоже пишу эмуль флопика. Но медленно... С кучей стейтмашин. И там замороченно!
https://bs0dd.zapto.org/grid/index.php?lang=rus&dir=yl3akc_GPIB_experiments_emul
https://bs0dd.zapto.org/grid/index.php?lang=rus&dir=yl3akc_GPIB_experiments_emul
KL
22:26
Польша наложила
Y
22:27
YL3AKC
In reply to this message
По норме там надо 50 мА. А малинка может до 16 мА. Но это близко к экстриму.
Ардуинка в шатном 20 мА. Ардуинка в экстиме 40 мА.
Экстрим может повредить пины и потом всё пропало. Малинка будет работать, но пины будут дохлые.
Ардуинка в шатном 20 мА. Ардуинка в экстиме 40 мА.
Экстрим может повредить пины и потом всё пропало. Малинка будет работать, но пины будут дохлые.
ВЗ
22:29
У меня открывается
Y
22:29
YL3AKC
In reply to this message
Нас не надо любить. Мы мужики.
Перая девка - Надежда? Или первая девка с именем Надежда?
Перая девка - Надежда? Или первая девка с именем Надежда?
ВЗ
22:29
Владислав Задорожкин
По глобальной
KL
22:30
Kirill Leyfer
In reply to this message
не, я так, по-братски, no gay
просто вы крутые и спасибо что возитесь со мной
просто вы крутые и спасибо что возитесь со мной
ВЗ
22:30
Владислав Задорожкин
Просто если открывается и у меня и у Яниса... так, мне это не нравится
u
ВЗ
KL
u
22:31
usernameak
я тут тем временем занимаюсь наркоманией и патчу OpenMW под PSVita :)
KL
ВЗ
22:31
Владислав Задорожкин
А у меня все еще статья, которую я собирался к 10 числу сдать
22:31
Уже 16😢
Y
22:31
YL3AKC
In reply to this message
Если бы я умел кодить на таком уровне как вы... То я был бы крутым. А так... Просто любитель.
u
KL
22:33
Kirill Leyfer
In reply to this message
ну, не скажи - вы с Антоном оба по эмулятору грида наколбасили - а я ноль эмуляторов наколбасил)
22:33
Антон даже два))
u
22:33
usernameak
In reply to this message
(впрочем, я бы уже давно пропатчил, если бы не ущербнейшая скорость сборки) :)
KL
22:33
Kirill Leyfer
свой с нуля и под mame
u
22:33
usernameak
In reply to this message
свой с нуля не удался из-за неудачного эмулятора процессора
KL
ВЗ
22:34
Владислав Задорожкин
In reply to this message
А ну ка спроьуй пинг сначала по домену
И счас IP кину
И счас IP кину
22:34
Надо понять какого хрена
u
Y
22:34
YL3AKC
In reply to this message
Я немного подклядывал у Антона и у МАМЕ. У меня только пузырь эмулируется в режиме чтения. Но и я спиздил код эмуля проца х86
KL
u
22:35
система уходит в бутлуп с ним :)
ВЗ
22:35
Владислав Задорожкин
In reply to this message
Зарезолвил правильно
А вот что не пингует... не правильно
А вот что не пингует... не правильно
Y
22:35
YL3AKC
К стати. Не надо было делать 'муль флопика.
Надо было сделать на ардуинке эмуль 7220 (контроллера пузырей) и впаять в место оригинального...
Надо было сделать на ардуинке эмуль 7220 (контроллера пузырей) и впаять в место оригинального...
u
22:35
usernameak
точнее даже не бутлуп
ВЗ
22:35
Владислав Задорожкин
Янис, у тебя пинг идет?
Y
KL
u
22:36
usernameak
In reply to this message
половина интерфейса executive прорисуется и виснет намертво
KL
22:36
Kirill Leyfer
эт только после того как я паять научусь
u
Y
u
22:36
usernameak
In reply to this message
не может определить FPU - видит что есть, но какой-то палёный
KL
22:37
Kirill Leyfer
In reply to this message
а ты поднимаешь на этой ардуинке или там ESP изнутри грида web server и выбираешь там образы, и переклчаешь)))
ВЗ
22:37
Владислав Задорожкин
In reply to this message
Ну значит скорее всего и пинг идет
Но почему тогда через РФ не идет
Это уже прям совсем не нравится
Но почему тогда через РФ не идет
Это уже прям совсем не нравится
KL
ВЗ
22:37
Владислав Задорожкин
Надо еще кого-то дернуть
KL
22:37
Kirill Leyfer
неужто рили санкциями обложили
ВЗ
22:37
Владислав Задорожкин
В Томске есть приятель
KL
22:38
вот говно
ВЗ
22:38
Владислав Задорожкин
Доехали... а главное что теперь мне делать
У меня ссылки в статях часто на мой сайт идут
И вот у читателей оно не открываться будет если...
У меня ссылки в статях часто на мой сайт идут
И вот у читателей оно не открываться будет если...
22:38
Тьфу ты
Y
22:38
YL3AKC
In reply to this message
Ну... Как народ хочет. Можно и веб интерфейсом с несколько имиджами на СД карточке.
Но да ладно. Это потом. Пока эмуль. Ибо штука полезная и получится сдампить интересный хард из коллекций Yuri S.
👍
Но да ладно. Это потом. Пока эмуль. Ибо штука полезная и получится сдампить интересный хард из коллекций Yuri S.
YL
ВЗ
22:39
Владислав Задорожкин
In reply to this message
А сделать нечего, тут как бы мои полномочия как бы этл уже все, вот
KL
22:40
Kirill Leyfer
In reply to this message
да говно блин
это поди РКН анус себе заблокировали опять
это поди РКН анус себе заблокировали опять
ВЗ
22:41
Владислав Задорожкин
Нет ладно у меня всякие НТВ и прочие такие сайты не открываются
22:41
Но чтоб наоборот
Y
22:42
In reply to this message
У меня тоже. даже яндекс глючит. А главное я из той комисси знаю 2 человк. Надо бы политчески надавить на них. Цензура в интернетах и сделать скандал с конституциональным судом.
ВЗ
22:43
Владислав Задорожкин
Просто вот иронично
Мы тут устраивали втроем поигрульки
Я, чувак с Питера, чувак с западной Укр
Сервер подымался в Питере
С началом хурмы у чувака с Укр попал под бан диапазон оператора чувака с Питера. Пришлось кряхтя-скрипя серверы всех играемых нами игр переносить ко мне. Ну ладно, сделали, играем, радуемся, доступ есть у обоих ко мне
А теперь что, опять пиздец?..
Мы тут устраивали втроем поигрульки
Я, чувак с Питера, чувак с западной Укр
Сервер подымался в Питере
С началом хурмы у чувака с Укр попал под бан диапазон оператора чувака с Питера. Пришлось кряхтя-скрипя серверы всех играемых нами игр переносить ко мне. Ну ладно, сделали, играем, радуемся, доступ есть у обоих ко мне
А теперь что, опять пиздец?..
KL
22:45
Kirill Leyfer
Ладно, я наверное пайкой займусь уже завтра, перед стримом
22:45
Чёт я понял, что не обедал ещё, а уже почти полночь)
Y
{kind=link}
ВЗ